
Getting Started
When selecting a DYNAMIXEL servo and control solution for your application, it is important to ensure that all of your chosen components are compatible with one another. One way to ensure that they will all be compatible with one another is to select them in the following order.
Each of these components is vital, and your choice for each will be dictated by the needs of your application, as well as your previous choices. It is important to consider all of the factors before you begin building your DYNAMIXEL, as well as during the selection process, so that you can ensure that all your choices are compatible.
The remainder of this document will provide a helpful guide to assist you in selecting the DYNAMIXEL Smart servo and control solution perfect for your use case.
e-Shop
To purchase items, please visit the e-Shop :
- ROBOTIS Global (International): http://en.robotis.com/shop_en/
- ROBOTIS America (USA): https://robotis.us/
- ROBOTIS Japan: https://e-shop.robotis.co.jp/
- ROBOTIS China: Products can be shopped at TaoBao for your convenience,
DYNAMIXEL
The first consideration for any DYNAMIXEL System is the actuator. Choosing a DYNAMIXEL for your application should start by understanding the capabilities and communication protocols supported by the actuator you are considering.
Models
DYNAMIXELs come in a variety of sizes and with a variety of capabilities, with each model especially suited for a particular purpose. Before we look into the specifics of DYNAMIXEL performance, it is helpful to understand the differences between each DYNAMIXEL model.
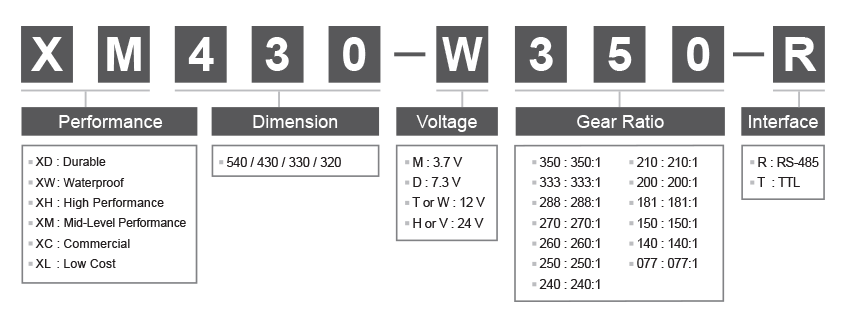
DYNAMIXEL-X Series Naming Convention
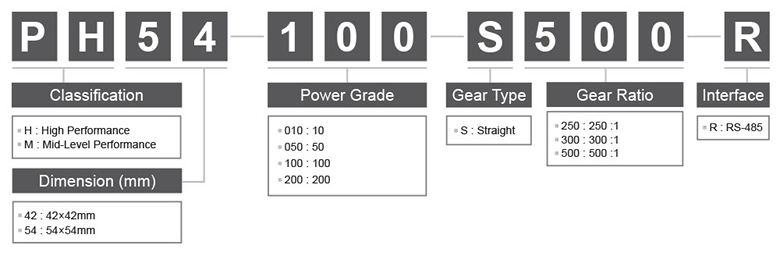
DYNAMIXEL-P Series Naming Convention
This information is invaluable in narrowing your choices for actuators before moving on to considering the performance of the units.
NOTE: DYNAMIXEL AX, MX series does not follow the naming convention, please jump to Performance.
Performance
The easiest way to select a DYNAMIXEL based on its performance is to look at the N-T graph:
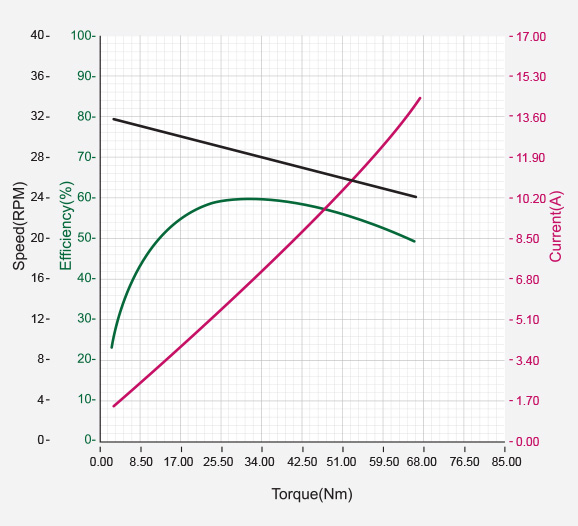
Performance Graph (N-T graph)
Most DYNAMIXEL servos have a graph like that one located on their page here on the e-Manual. This graph provides an easy way to examine the overall performance characteristics of the servo at a glance, by graphing four of the most important metrics against one another:
NOTE: In selecting DYNAMIXEL in terms of torque, ~20% of Stall Torque (See Specification) of DYNAMIXEL will be the general range of use for your system.
-
Torque(Nm) - External load applied at the shaft of servo. By the Torque(Nm), Output Speed(A) and Current(A) are determined
-
Speed(RPM) - The output speed at the Torque. This shares the black line.
-
Current(A) - The amount of current drawn at the Torque. Represented by the red line.
-
Efficiency(%) - The output efficiency considering with a DC motor and its gearset. Different motors and gearset will perform more or less efficiently at different speeds and loads. This is represented by the green line.
These factors can help you compare the performance of different DYNAMIXELs to help you find the one that is right for your use case.
Communication
Each DYNAMIXEL supports one of two serial communications: TTL, RS-485.
To communicate with DYNAMIXELs using a controller, the same communication interface(TTL or RS-485) must be used.
 Tip: Looking for a solution to combining TTL and RS-485 of DYNAMIXEL in your system ?
Tip: Looking for a solution to combining TTL and RS-485 of DYNAMIXEL in your system ?
Ordinarily, DYNAMIXELs utilizing different serial protocols can not communicate with one another over the same serial bus. This means that it is important to select servos using compatible communications protocols. In some applications, you may need to combine DYNAMIXELs with mismatched serial protocols. For these cases, you can combine mismatched serial protocols using a DYNAMIXEL Communication Bridge.

TTL
TTL (Transistor-Transistor Logic), 0 to 5V logic level, is the common serial communication interface of DYNAMIXEL.
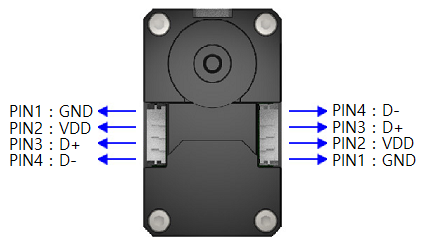
An easy way to identify TTL DYNAMIXEL actuator is that the model name ends with a “-T” (e.g, XL330-M288-T) and has three pins ports.
Pin Diagram for TTL Based DYNAMIXEL, using JST connectors
Tip: Communication Circuit of TTL based DYNAMIXEL
To control the DYNAMIXEL actuators, the main controller needs to convert its UART signals to the half duplex type. The recommended circuit diagram for this is shown below.
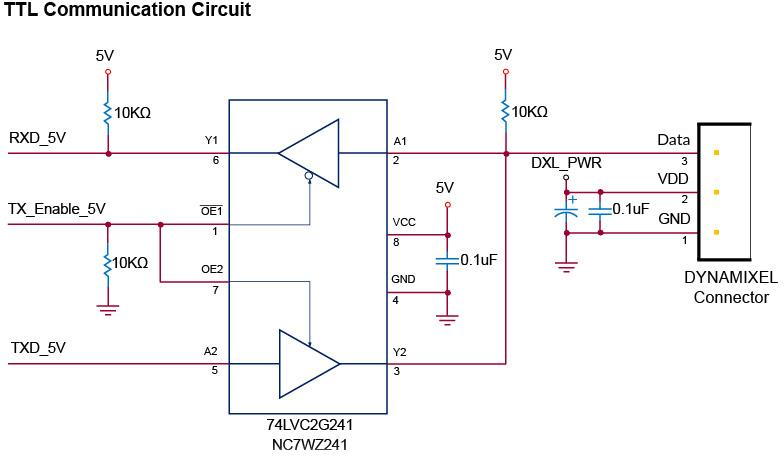
NOTE: Above circuit is designed for 5V or 5V tolerant MCU. Otherwise, use a Level Shifter to match the voltage of MCU.
NOTE: 3.3V logic DYNAMIXELs, such as XL330 series, is 5V tolerant at data line.
RS-485
Some higher end DYNAMIXEL servos operate using RS-485 communications protocol. If you need longer cabling distance, RS-485 will the best option for you.
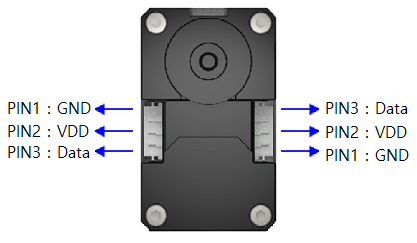
An easy way to identify RS-485 based DYNAMIXEL actuator is that the model name ends with a “-R” (e.g, XD40-T150-R) and has four pins ports.
Pin Diagram for RS-485 Based DYNAMIXEL, using JST connectors
Tip: Communication Circuit of RS-485 based DYNAMIXEL
To control the DYNAMIXELs, the main controller needs to convert its UART signals to the half duplex type. The recommended circuit diagram for this is shown below.
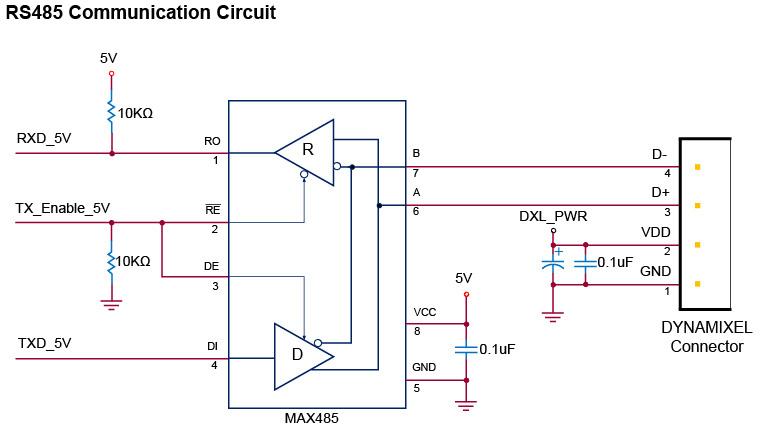
NOTE: Above circuit is designed for 5V or 5V tolerant MCU. Otherwise, use a Level Shifter to match the voltage of MCU.
Power
Supplying your DYNAMIXELs with adequate power is important to ensure proper function of your DYNAMIXEL System. DYNAMIXELs can be powered in a variety of ways, depending on the needs of the DYNAMIXEL and your project.
NOTE: For allowable current to a daisy chain of DYNAMIXELs in your system, visit your product e-Manual and see the Connector Information (e.g,XD540-T150 Connector Information)
Note that used connector may differ depending on your selection.
Operating Voltage
Before selecting your power solution, check out the operating voltage for each DYNAMIXEL Model.
DYNAMIXEL-X
Operating Voltage may differ depending on what model to be selected. See the following table.
| Symbol | Operating Voltage | Recommended |
|---|---|---|
| M | 3.7 ~ 6.0 | 5.0 |
| T / W | 10.0 ~ 14.8 (Max 12V for XL430, XC330) |
12.0 (11.1V for XL430, XC330) |
| H / V | 24.0 | 24.0V |
NOTE: The Symbol in the table follows our Naming Convention of DYNAMIXEL-X series only. For other DYNAMIXEL family’s operating voltage, such as AX, MX, please visit DYNAMIXEL.com and find it at Voltage cell in a table.
DYNAMIXEL-P
DYNAMIXEL-P Series runs at 24.0V. This can be compatible with DYNAMIXEL-X’s V models (24V) which represent operating voltages at 24V.
Power Solution
SMPS
The SMPS is recommended power solution with ROBOTIS’ providing interface and controller. Most of items offer the SMPS DC Connector that is compatible with 2.5mm / 5.5mm OD, Center Positive SMPS.

SMPS 12V, 5A
Batteries
The Batteries provides more mobility than a fixed power supply can offer, in those cases batteries may be the optimal solution for your high mobility robot. If LiPo batteries are your choice, check if there is PCM (Protection Circuit Modules) are included for your system safety.

LiPo Battery(LB-012) 11.1V 1800mAh
PSU
The PSU gives you wide range of power options for your system. Espectially, With DYNAMIXEL-P or DYNAMIXEL-X with V model (24V), PSU will be the right selection for your system. Using a sufficient wattage model is recommended for the voltage stability.
Controller & Interface
The controller is one of the essential of the DYNAMIXEL system responsible for accessing the Control Table of DYNAMIXEL to read and write the data.
For most applications, you can choose which of the following control solution fits your needs best.
NOTE: The DYNAMIXEL Controller Compatibility Chart provides a convenient way to quickly check which controllers are compatible with each of ROBOTIS’ sensors, servos, and software.
Interfaces
U2D2
U2D2 is a serial interface that can convert USB to TTL / RS-485 signal.
Using the inteface like U2D2 allow you to use DYNAMIXEL Wizard 2.0 and DYNAMIXEL SDK.

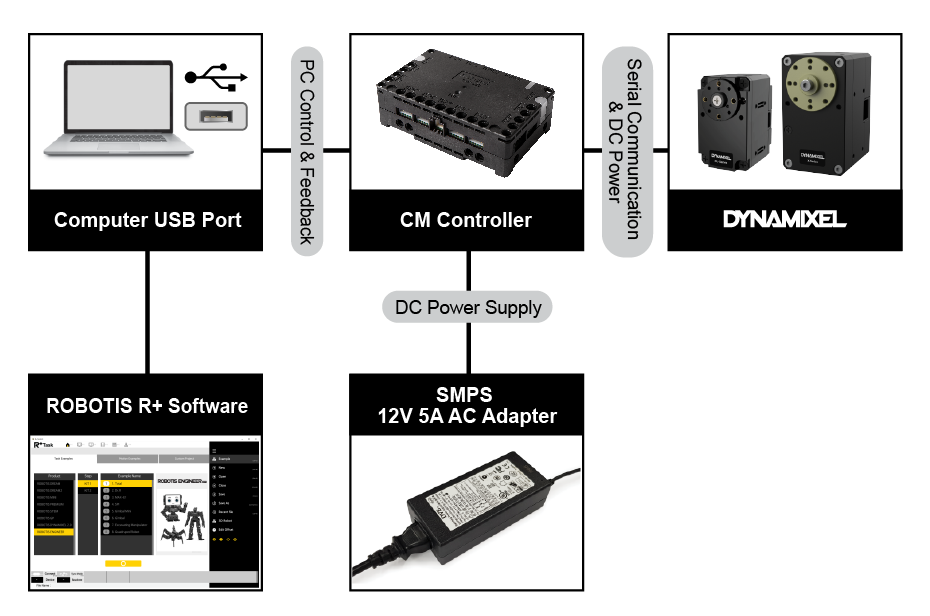
The DYNAMIXEL Starter Set includes everything you need to utilize your PC as your chosen controller, a U2D2, U2D2 Power Hub Board, and an SMPS 12V 5A AC Adapter
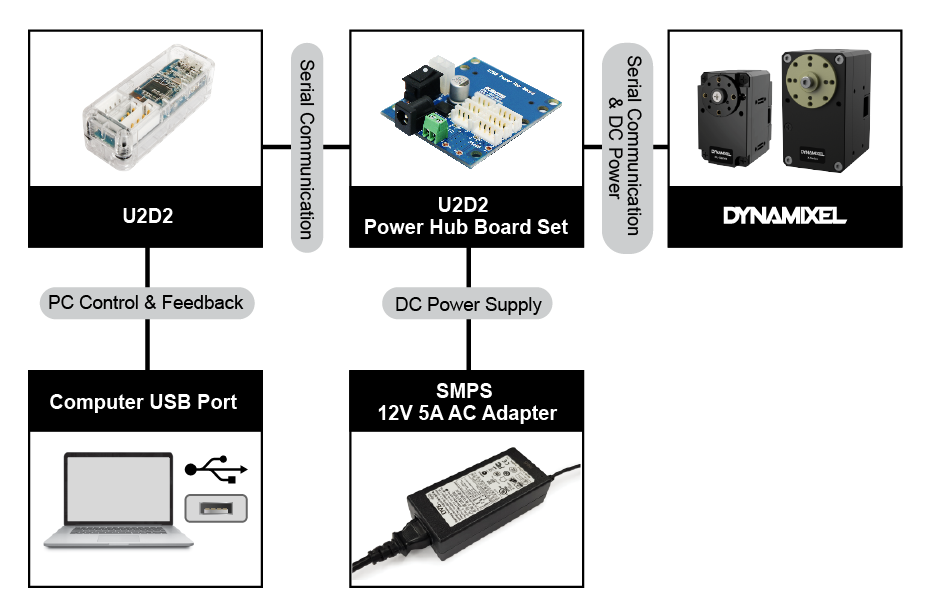
Connection Example of the DYNAMIXEL Starter Set
DYNAMIXEL Shields
The DYNAMIXEL Shield and DYNAMIXEL Shield MKR were created to enable users to easily integrate DYNAMIXELs into their arduino based projects. Using the shields in combination with the DynamixelShield library enables Arduino users to do the DYNAMIXELs with simple APIs.
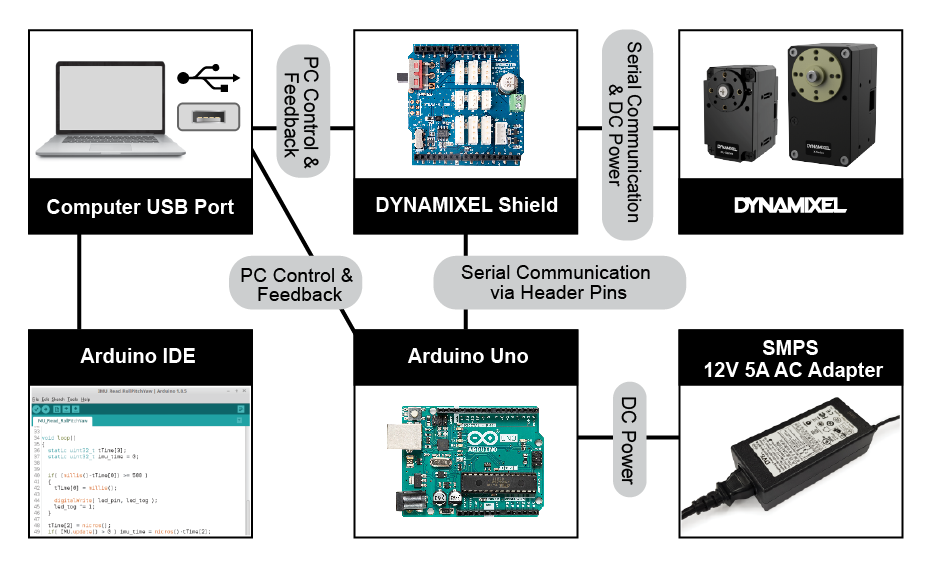
Connection Example of DYNAMIXEL with DYNAMIXEL Shield
Embedded Controllers
OpenRB-150
The OpenRB-150 is a new open source Arduino compatible embedded controller.
The controller features the same pinout and the form factor as the Arduino MKR to ensure compatibility with phyisical accessories, and has support for programming using the Arduino IDE.
The OpenRB-150 also features 4 dedicated DYNAMIXEL ports, and supports the DYNAMIXEL Wizard 2.0 testing and calibration softwere.
- Program the controller with Arduino IDE
- Compatible with Arduino MKR Shields
- Dedicated 4 DYNAMIXEL TTL connectors
- Support DYNAMIXEL Wizard 2.0 for easier use and maintenance of DYNAMIXEL
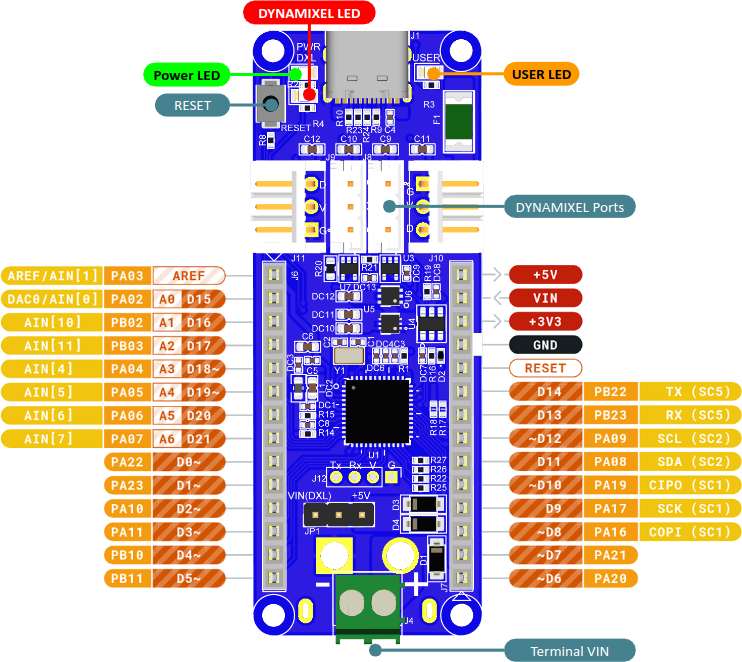
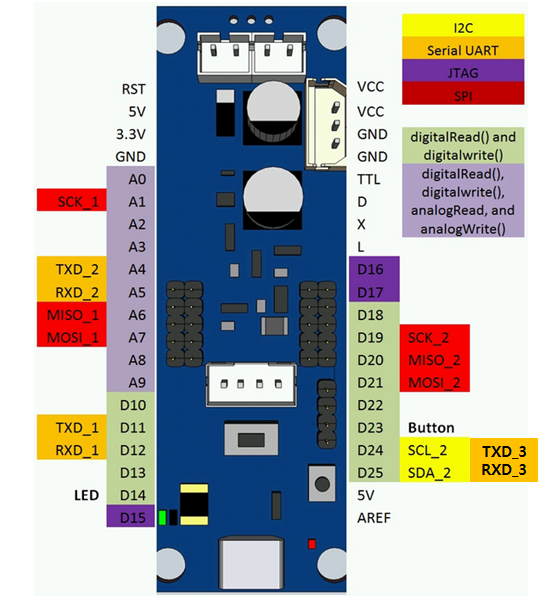
OpenRB-150 Layout and Pin Map
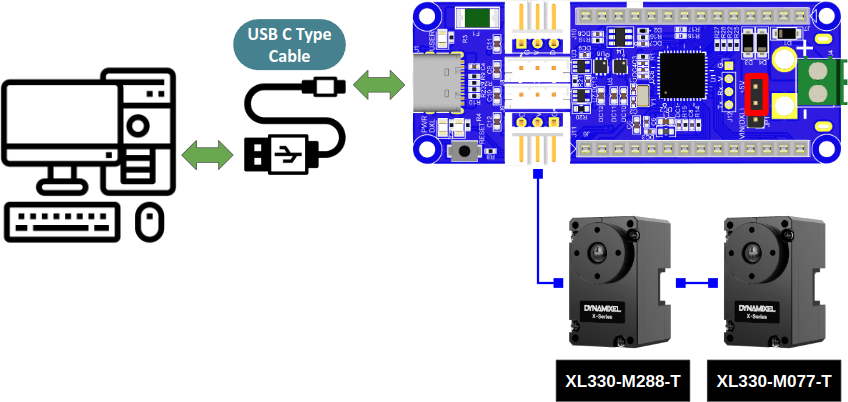
Power Connection Example using USB
Power Connection Example using SMPS
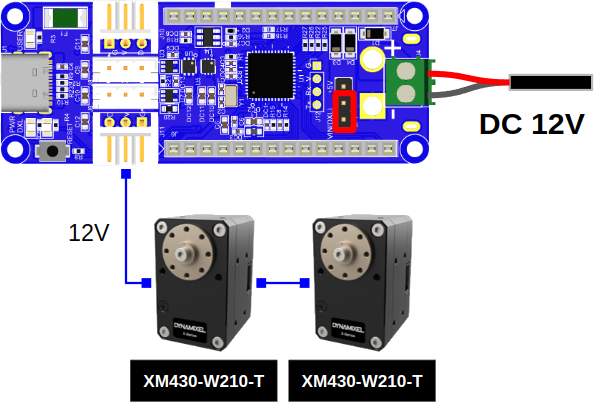
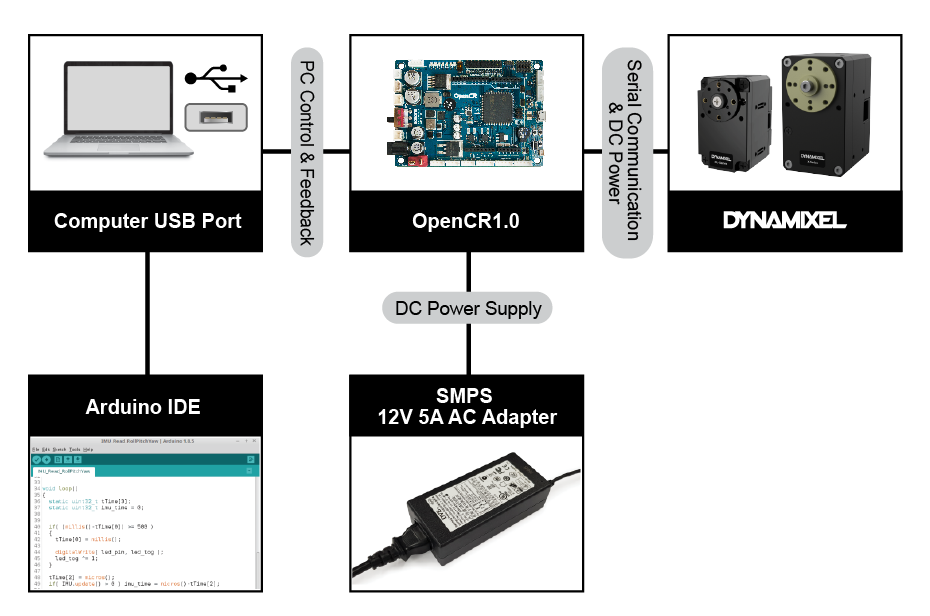
OpenCR1.0
OpenCR1.0 (Open-source Control module for ROS) is an open source robot controller with a powerful embedded MCU from the ARM Cortex-M7 line-up. The hardware, software, schematics, PCB Gerber, BOM, and firmware of the OpenCR1.0 are completely open source. It was developed to serve as the main controller used in the official ROBOTIS ROS education platform TurtleBot3.
The OpenCR is also compatible with Arduino IDE for developing customized software for your projects (DYNAMIXEL SDK (Arduino), Arduino Library).
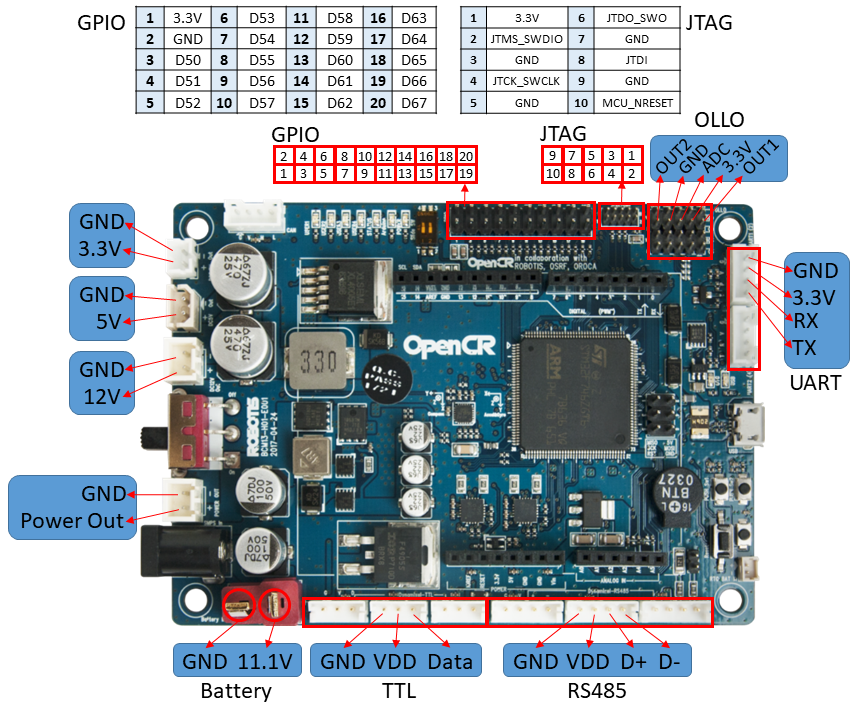
OpenCR 1.0 Layout and Pin Map
Connection Example of DYNAMIXEL with OpenCR 1.0
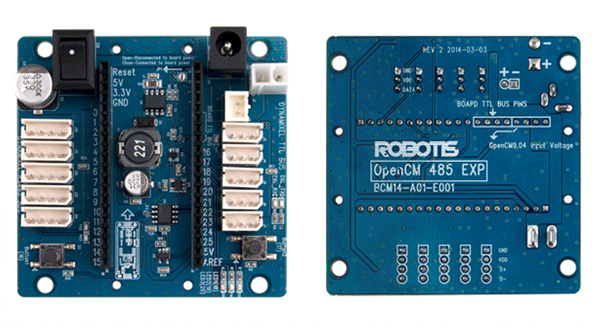
OpenCM9.04
OpenCM9.04 is featuring an embedded MCU from the ARM Cortex-M3 line-up. The OpenCM is compatible with the Arduino IDE(DYNAMIXEL SDK (Arduino), Arduino Library) for development of custom software for your project.
NOTE: When combined with the OpenCM 485 EXP Board the OpenCM 9.04 can drive RS-485 DYNAMIXELs as well as TTL based DYNAMIXEL.
Educational
CM Series
CM Series are designed for the Educational Kits to support our dedicated educational software.
Most of CM Series controllers provide the OLLO Ports where dedicated sensors for CM series can be mounted and easily controled by using R+ software.
Connection Example of DYNAMIXEL with CM series.
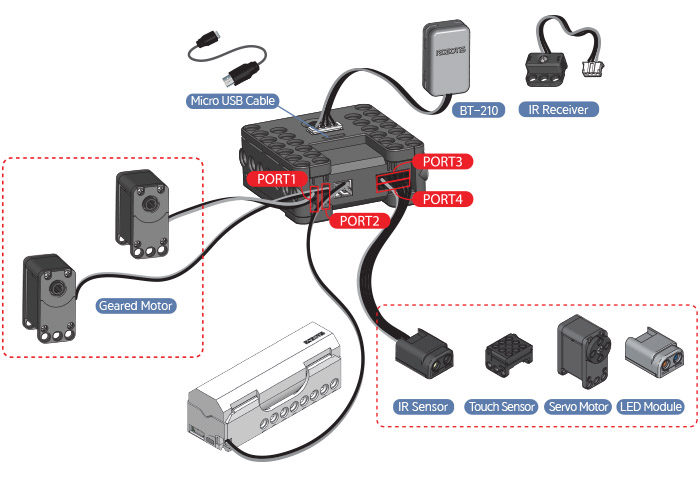
e.g, OLLO Ports for sensor controls on CM-150
The following items are our recent & the most popular educational level controllers. Checkout its specification, and select the one to meet your requirements in your educational use.
NOTE: To see a full range of controllers provided by ROBOTIS, visit our Controllers page.
NOTE: Not all sensors are compatible with each CM series, check out the compatible sensors with each CM series at Parts Compatibility
Other Controllers
ROBOTIS provides a range of Educational Kits and DYNAMIXEL System that accompany a dedicated controller.
See all the range of Controllers for more information.
Software & Tools
Your choice of software is another important consideration for your DYNAMIXEL System. Your controller combined with your software defines the capabilities of your project, and how you will interact with your DYNAMIXELs.
Check out the Software Compatibility which software is supportive with your selection.
Test & Management
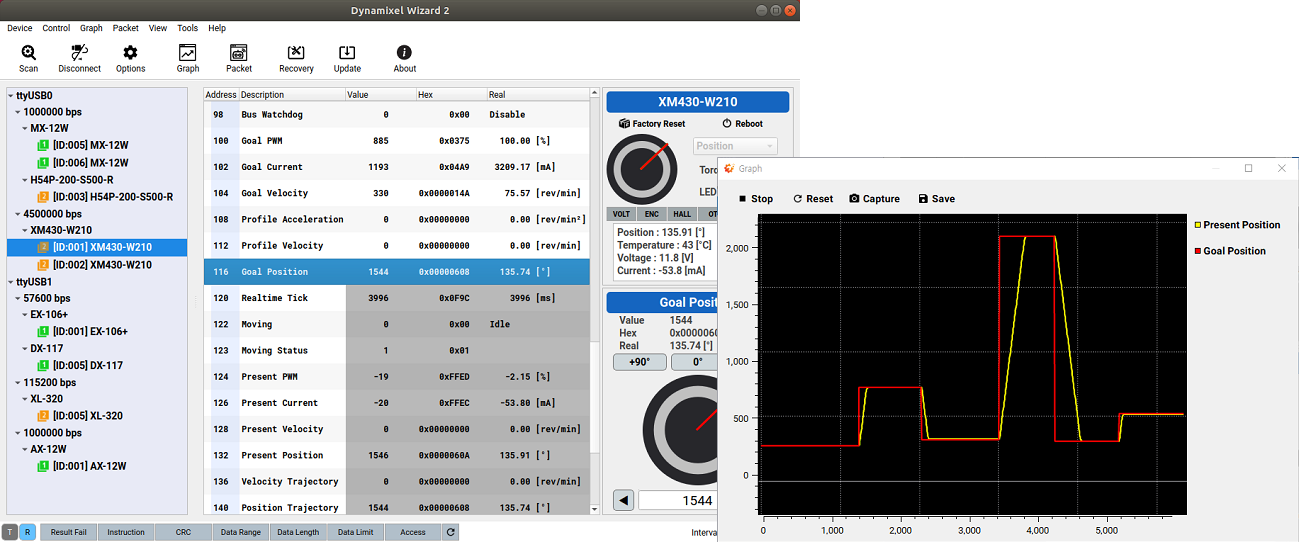
DYNAMIXEL Wizard 2.0
DYNAMIXEL Wizard 2.0 is an optimized tool for managing DYNAMIXEL’s from various operating systems (Linux / Mac / Windows). U2D2 or Compatible controller is required to use.
The following features are provided with DYNAMIXEL Wizard 2.0.
- DYNAMIXEL Firmware Update
- DYNAMIXEL Diagnosis
- DYNAMIXEL Configuration and Test
- DYNAMIXEL Data Plotting in Real-Time
- Generate & Monitor DYNAMIXEL Packets
R+ Manager 2.0
R+ Manager 2.0 is one of the R+ Software Suite for you to maintanance Educational Kits including CM-Series and its supported DYNAMIXELs.
NOTE: For those who developing DYNAMIXEL System, DYNAMIXEL Wizard 2.0 will provide the best experience in terms of DYNAMIXEL test and management.
DYNAMIXEL Development
DYNAMIXEL SDK
DYNAMIXEL SDK is a software development kit to support a variety programming language(C, C++, C#, Python, Java, Matlab and LabVIEW) on major OS(Linux, Windows, Mac). The provided APIs will allow you to manipulate data of DYNAMIXEL with ease.
NOTE: It is recommended to use U2D2 (USB to TTL & RS-485 converter) to interface DYNAMIXEL with your development device (PC,SBC and etc). Otherwise, You will be required to build DYNAMIXEL communication circuit. See Communication
DYNAMIXEL SDK (Arduino)
Embedded Controllers support DYNAMIXEL SDK at Arduino IDE and allow your system to use full APIs of the SDK.
NOTE: If you are a hobbiest user, it is recommended to use our comprehensive APIs in Dynamixel2Arduino library.
Arduino Library
ROBOTIS provides comprehensive code APIs and basic example for Arduino users.
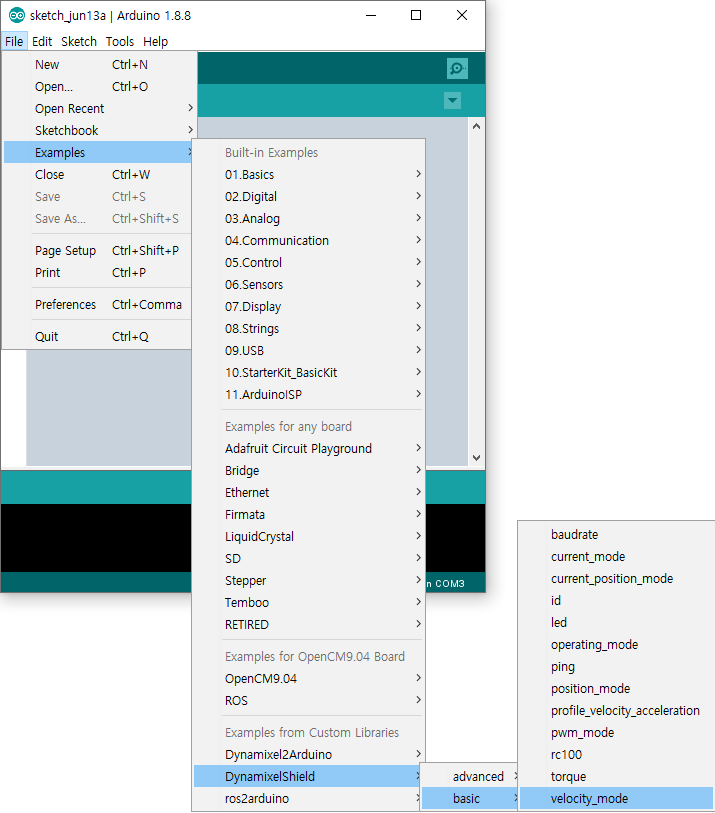
DynamixelShield Library: Basic Examples
Dynamixel2Arduino
Dynamixel2Arduino library designed based on DYNAMIXEL SDK provides comprehensive code APIs. Dynamixel2Arduino give you user-friendly experience than DYNAMIXEL SDK in Arduino
DynamixelShield
DynamixelShield library inherits features of Dynamixel2Arduino. But this is specifially designed for DYNAMIXEL Shields to interface with Arduino boards.
Educational Software
Educational software is ROBOTIS dedicated software for our educational kits and CM Series.
- Task and motion programming tools (R+ Software Suite) provide a variety of examples that you can start off.
- For easy maintanance for your kits and CM Series, ROBOTIS provdides free manager program for our educational kits and CM Series controller. See R+ Manager 2.0
R+ Software Suite
The R+ (Roboplus) Software suite is ROBOTIS’ first party robot controller software offering. R+ is offered in a variety of forms to enable users to start the programming style they feel most comfortable with. See provided R+ Software.
R+Task 3.0