
イントロダクション
![]()
DYNAMIXEL Workbenchの目的は、任意のDYNAMIXELをよりシンプルに、そして使いやすくすること です。このライブラリはDYNAMIXEL SDKをベースとしており、ROS、Linux、macOS、Arduinoをサポートしています。しかし、このライブラリはどんなセットアップでもDYNAMIXELを操作できるマジックスティックではありません。DYNAMIXEL SDKと比較するといくらかの制限がありますが、DYNAMIXELを愛用してくださる皆さんのために今後もライブラリをアップデートしていきます。
質問や問題があれば、github issueでチケットを入手してください。
注意 : DYNAMIXEL Workbenchは、ROSでDYNAMIXELを制御するために設計されていますが、機能が制限されています。DYNAMIXELの設定やテストには、DYNAMIXEL Wizard 2.0またはDYNAMIXEL SDKをご利用ください。
サポートしているDYNAMIXEL
DYNAMIXEL Workbench メタパッケージには、Controllers、Operators そして Toolbox の3つパッケージが含まれています。Controllers パッケージは、DYNAMIXEL Workbenchライブラリ(Toolbox)を使って、異なる動作モードでDYNAMIXELを使用する方法を紹介します。また、Operatorsでは、コントローラを操作することによっていくつかの簡単な例を紹介します。
ダウンロード
ROS
PCにROSをインストール
![]()
以下のスクリプトを使用すると、ROSのインストール手順を簡略化することができます。ターミナルウィンドウで以下のコマンドを実行します。ターミナルアプリは、画面左上のUbuntu検索アイコンから見つけることができます。もしくは、ショートカットキーであるCtrl+Alt+Tを使うことでも見つけられます。ROSをインストールした後は、PCを再起動してください。
$ sudo apt-get update
$ sudo apt-get upgrade
$ wget https://raw.githubusercontent.com/ROBOTIS-GIT/robotis_tools/master/install_ros_kinetic.sh && chmod 755 ./install_ros_kinetic.sh && bash ./install_ros_kinetic.sh
注釈: どのパッケージがインストールされているかを確認するには、このリンクを確認してください。 install_ros_kinetic.sh
手動インストールをご希望の場合は、以下のリンクをクリックしてください。
ROSパッケージをダウンロード
主なパッケージ
$ git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench.git
$ git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench-msgs.git
依存パッケージ
$ git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git
OpenCRとOpenCM
Arduino IDEのダウンロード
- OpenCRとOpenCMにファームウェアをアップロードするための Arduino IDE をダウンロードします。
OpenCR Arduino IDE
OpenCR1.0用の例をArduinoで使用するためには、OpenCR1.0ボードをArduino IDEにポーティングする必要があります。
OpenCM Arduino IDE
OpenCM9.04用の例をArduinoで使用するためには、OpenCM9.04ボードをArduino IDEにポーティングする必要があります。
Linux and macOS
注釈: Windows OS向けにリリースする予定はありません。しかし、Windows環境に関するコントリビューションは喜んでマージします。
ダウンロードライブラリ
$ git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git
$ git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench.git
DYNAMIXEL SDKライブラリのセットアップ
DYNAMIXEL Workbenchライブラリのセットアップ
$ cd ~/dynamixel-workbench/dynamixel_workbench_toolbox/examples
$ mkdir -p build && cd build
$ cmake ..
$ make
デバイスのセットアップ
警告: ライブラリを使用する前に、デバイスの設定を 繰り返し 確認してください。
電源入力 と USBポート をもう一度確認してください。
U2D2
セットアップ方法
ルールファイルのコピー
$ wget https://raw.githubusercontent.com/ROBOTIS-GIT/dynamixel-workbench/master/99-dynamixel-workbench-cdc.rules
$ sudo cp ./99-dynamixel-workbench-cdc.rules /etc/udev/rules.d/
$ sudo udevadm control --reload-rules
$ sudo udevadm trigger
USBポートの確認
$ ls /dev/tty*
そうすると、/dev/ttyUSB0が見つかります。(ポートの番号は設定によって異なる場合があります)
注釈:
- rosrunはroscoreなしでは動作できないため、rosrunの前にroscoreを実行してください。その際にrosrunとroscoreは別々のターミナルウィンドウで実行してください。
- この実行ファイルでは、USBレイテンシタイマを 1 ms に設定しています。この設定を確認したい場合は、ターミナルウィンドウで以下のコマンドを実行してください。
cat /sys/bus/usb-serial/devices/ttyUSB0/latency_timer
OpenCR
電源(12V)とTTLまたはRS485の接続
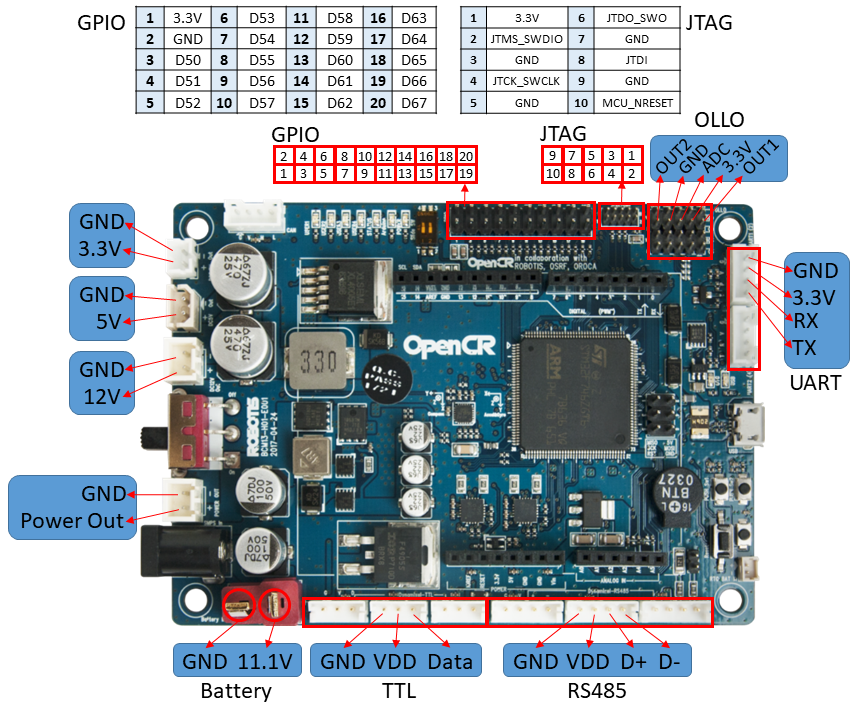
ヒント:
OpenCRをU2D2として使用したい場合は、usb_to_dxlファームウェアをアップロードしてください。(File -> Examples -> OpenCR -> 10.Etc -> usb_to_dxl)
そうすると、/dev/ttyACM0ポートを使用することができます。(ポート番号は設定によって異なる場合があります)
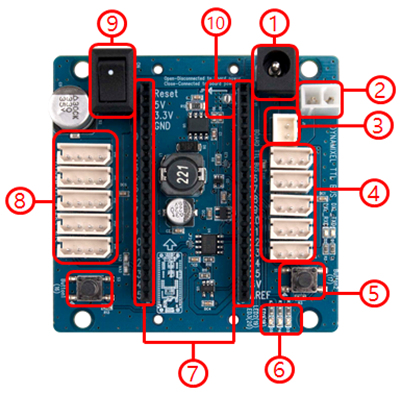
OpenCM
電源(12V)とTTL(4ピン)またはRS485(8ピン)の接続
ヒント: ピンについての詳細な情報については、リンクを参照してください。
チュートリアル
ROSチュートリアル
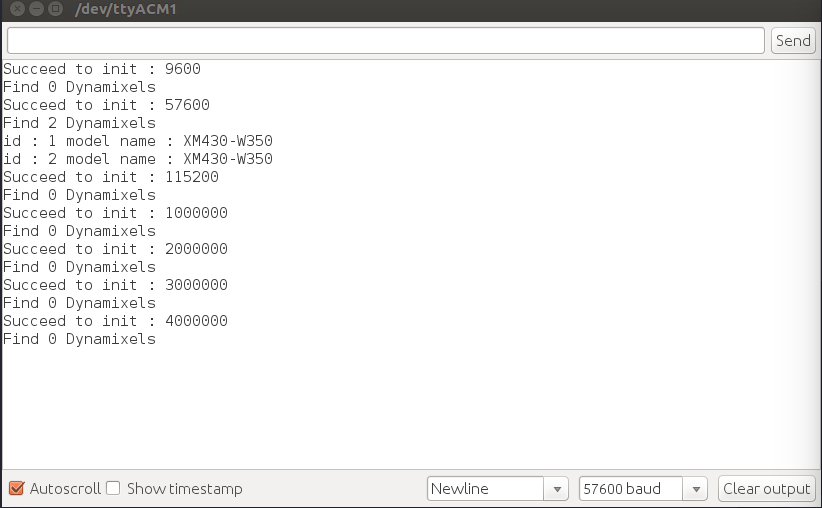
Find Dynamixels
このノードは全てのIDをそれぞれのBaudrate(9600, 57600, 115200, 1000000, 2000000, 3000000, 4000000)ごとにスキャンし、接続しているDynamixelの数を表示します。
find_dynamixelの実行
$ rosrun dynamixel_workbench_controllers find_dynamixel /dev/ttyUSB0
すると、以下のようなテキストが表示されます。
[ INFO] [1544589715.841211668]: Succeed to init(9600)
[ INFO] [1544589715.841236741]: Wait for scanning...
[ INFO] [1544589737.539083688]: Find 0 Dynamixels
[ INFO] [1544589737.539526809]: Succeed to init(57600)
[ INFO] [1544589737.539570059]: Wait for scanning...
[ INFO] [1544589755.441019922]: Find 2 Dynamixels
[ INFO] [1544589755.441086482]: id : 1, model name : XM430-W350
[ INFO] [1544589755.441109032]: id : 2, model name : XM430-W350
[ INFO] [1544589755.441504892]: Succeed to init(115200)
[ INFO] [1544589755.441548969]: Wait for scanning...
[ INFO] [1544589773.031677244]: Find 0 Dynamixels
[ INFO] [1544589773.032153380]: Succeed to init(1000000)
[ INFO] [1544589773.032178580]: Wait for scanning...
[ INFO] [1544589790.291943770]: Find 0 Dynamixels
[ INFO] [1544589790.292404604]: Succeed to init(2000000)
[ INFO] [1544589790.292418207]: Wait for scanning...
[ INFO] [1544589807.530702991]: Find 0 Dynamixels
[ INFO] [1544589807.531286252]: Succeed to init(3000000)
[ INFO] [1544589807.531331656]: Wait for scanning...
[ INFO] [1544589824.762803705]: Find 0 Dynamixels
[ INFO] [1544589824.763461821]: Succeed to init(4000000)
[ INFO] [1544589824.763506935]: Wait for scanning...
[ INFO] [1544589841.990120553]: Find 0 Dynamixels
ヒント: DYNAMIXELが見つからない場合は、USBポート、電源を確認してください。たとえ見つからない場合でも、ROBOTISソフトウェア(R+ Manager 2.0もしくはR+ Manager 1.0)を使用してファームウェアを確認してください。
Controllers
本パッケージは、ROS APIを用いてDYNAMIXELを制御するためのパッケージです。yamlファイルを作成するだけで、DYNAMIXELを読み込むことができます。
yamlファイルの設定は以下の通りです。nameは、/joint_statesトピックのジョイント名とDYNAMIXELを識別するために使用します。
コントローラが初期化されると、ファイルからDYNAMIXELの情報が読み込まれ、idを基にしたそれぞれのControl_Table_Itemとvalueを共に各DYNAMIXELに設定します。
[name]:
ID: [id]
[Control_Table_Item]: [value]
[Control_Table_Item]: [value]
.
.
.
[name]:
ID: [id]
[Control_Table_Item]: [value]
[Control_Table_Item]: [value]
[Control_Table_Item]: [value]
.
.
.
joint_2_0.yamlファイルを見てみましょう。このファイルは2つのDYNAMIXELの設定を示しています。最初のDYNAMIXELは’pan’という名前でIDは’1’で、2番目のDYNAMIXELは’tilt’という名前でIDは’2’です。両方のDYNAMIXELは、 Return_Delay_timeをゼロ(0)に Operating_Mode位置制御モード(3)に設定します。
pan:
ID: 1
Return_Delay_Time: 0
Operating_Mode: 3
Profile_Acceleration: 0
Profile_Velocity: 0
tilt:
ID: 2
Return_Delay_Time: 0
Operating_Mode: 3
Profile_Acceleration: 0
Profile_Velocity: 0
警告: パッケージを正しく使用するために、以下のものを必ず保管してください。
-DYNAMIXELのコントロールテーブルのデータであるTorque Enableは、ユーザーが設定することは想定していませんが、初期化時に有効にしています。
- コントロールテーブルの項目は、Camel_Caseに従って空白無しで設定する必要があります。
- 本パッケージを使用する前に、DYNAMIXELのIDを必ず設定してください。
- 2XL430-W250は、本パッケージ(Controllers)には対応していません。本パッケージを2XL430-W250で使用すると、2XL430-W250の2つの軸から検出されたIDのうち、Torque Enable(64)の片方が自動的に’1’(トルクオン)に設定されます。
この場合、もう一方の車軸のEEPROM非アクティブ化され、パッケージはEEPROMフィールドにアクセスできず、パッケージを使う際に接続エラーを引き起こします。
dynamixel_controller.launchファイルを見てください。
<launch>
<arg name="usb_port" default="/dev/ttyUSB0"/>
<arg name="dxl_baud_rate" default="57600"/>
<arg name="namespace" default="dynamixel_workbench"/>
<arg name="use_moveit" default="false"/>
<arg name="use_joint_state" default="true"/>
<arg name="use_cmd_vel" default="false"/>
<param name="dynamixel_info" value="$(find dynamixel_workbench_controllers)/config/basic.yaml"/>
<node name="$(arg namespace)" pkg="dynamixel_workbench_controllers" type="dynamixel_workbench_controllers"
required="true" output="screen" args="$(arg usb_port) $(arg dxl_baud_rate)">
<param name="use_moveit" value="$(arg use_moveit)"/>
<param name="use_joint_states_topic" value="$(arg use_joint_state)"/>
<param name="use_cmd_vel_topic" value="$(arg use_cmd_vel)"/>
<rosparam>
publish_period: 0.010
dxl_read_period: 0.010
dxl_write_period: 0.010
mobile_robot_config: <!--this values will be set when 'use_cmd_vel' is true-->
seperation_between_wheels: 0.160 <!--default value is set by reference of TB3-->
radius_of_wheel: 0.033 <!--default value is set by reference of TB3-->
</rosparam>
</node>
</launch>
Launch dynamixel_controller
$ cd ~/catkin_ws && catkin_make
$ roslaunch dynamixel_workbench_controllers dynamixel_controllers.launch
コントローラがDYNAMIXELを読み込むと、以下のテキストが表示されます。
[ INFO] [1544595828.276238724]: Name : pan, ID : 1, Model Number : 1020
[ INFO] [1544595828.316198852]: Name : tilt, ID : 2, Model Number : 1020
初期化をすると、DYNAMIXELはトルクオン状態になります。DYNAMIXELに値を書き込むには、ROS service(/dynamixel_command)を利用します。
rqtとPlugins -> Services -> Service Callerを開きます。
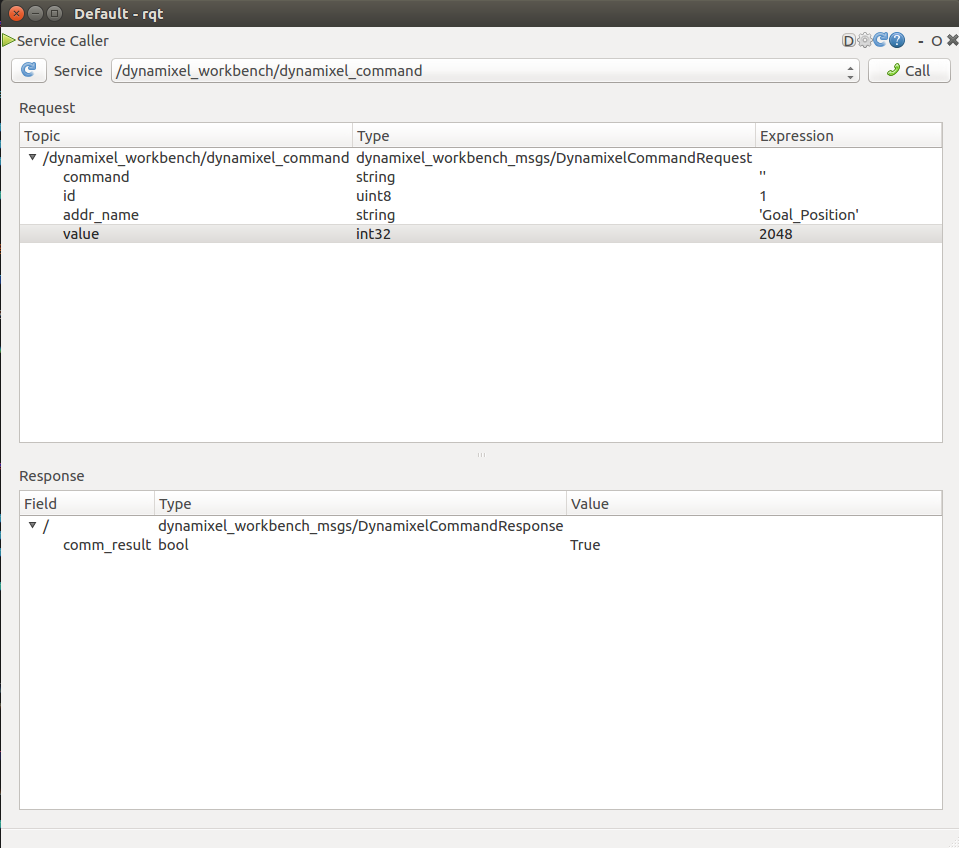
またはコマンドラインを使います。
$ rosservice call /dynamixel_workbench/dynamixel_command "command: ''
id: 1
addr_name: 'Goal_Position'
value: 2048"
パラメーターの一覧 :
-
usb_port
使用したUSBのポート名です。 -
dxl_baud_rate
DYNAMIXELのボーレートです。 -
namespace
このパッケージの名前空間です。 -
dynamixel_info
YAMLファイルのパスです。 -
publish_period
トピックの配信周期です。(msec) -
dxl_read_period
DYNAMIXELの読み取り情報の周期です。(msec) -
dxl_write_period
DYNAMIXELへの値の書き込み周期です。(msec) -
use_moveit
MoveIt!によって計算した関節軌道を使用する場合は、Trueを設定してください。 -
use_joint_states_topic
/joint_statesを配信したい場合は、Trueを設定してください。 -
use_cmd_vel_topic
/cmd_velを購読したい場合は、Trueを設定してください。 -
seperation_between_wheels
このパラメーターは、use_cmd_vel_topicがTrueの場合に有効です。 -
radius_of_wheel
このパラメーターは、use_cmd_vel_topicがTrueの場合に有効です。
トピック一覧 :
-
/dynamixel_state(dynamixel_workbench_msgs/DynamixelStateList)
接続されたDYNAMIXELの状態を提供します。 -
/joint_states(sensor_msgs/JointState)
接続されたDYNAMIXELの関節情報を提供します。 -
/joint_trajectory(trajectory_msgs/JointTrajectory)
DYNAMIXELを制御するための関節軌道を受信します。
サービス一覧 :
/dynamixel_command(dynamixel_workbench_msgs/DynamixelCommand)
DYNAMIXELを制御するためのコマンドを受信します。
Operators
Joint Operators
本パッケージは、ROSメッセージを作成し、コントローラーに配信するためのパッケージです。
yamlファイルの設定は以下の通りです。はじめに、controllersから読み込む際に関節名を登録します。次に、モーション名を登録してください。それぞれのモーション名には、開始からのステップと時間が設定されています。ステップの大きさは、ジョイント名と同じにします。
joint:
names: [[name1], [name2]]
motion:
names: [[motion_name1], [motion_name2]]
[motion_name1]:
step: [[position1], [position2]]
time_from_start: [time]
[motion_name2]:
step: [[position1], [position2]]
time_from_start: [time]
.
.
.
それでは、motion.yamlファイルを見てみましょう。このファイルは2つのDYNAMIXELを読み込んでいることを示しています。1つ目のDYNAMIXELには’パン’、そして2つ目のDYNAMIXELには’チルト’という名前がついています。このファイルには、3つのモーションが登録されています。
joint:
names: [pan, tilt]
motion:
names: [right, zero, left]
right:
step: [-3.14, -3.14] # radian
time_from_start: 2.0 # sec
zero:
step: [0.0, 0.0]
time_from_start: 3.0
left:
step: [3.14, 3.14]
time_from_start: 6.0
Launchコントローラーとjoint_operator
警告: コントローラーは、joint_2_0.yaml もしくは joint_1_0.yaml を設定してください。
$ cd ~/catkin_ws && catkin_make
$ roslaunch dynamixel_workbench_controllers dynamixel_controllers.launch
$ roslaunch dynamixel_workbench_operators joint_operator.launch
コントローラーがDYNAMIXELを読み込むと、以下のテキストを見ることができます。
[ INFO] [1544595828.276238724]: Name : pan, ID : 1, Model Number : 1020
[ INFO] [1544595828.316198852]: Name : tilt, ID : 2, Model Number : 1020
operator launchが成功した場合、以下のテキストを見ることができます。
[ INFO] [1544598264.311365515]: motion_name : right, step : -3.140000
[ INFO] [1544598264.311399654]: motion_name : right, step : -3.140000
[ INFO] [1544598264.311414820]: time_from_start : 2.000000
[ INFO] [1544598264.311453292]: motion_name : zero, step : 0.000000
[ INFO] [1544598264.311466789]: motion_name : zero, step : 0.000000
[ INFO] [1544598264.311478179]: time_from_start : 3.000000
[ INFO] [1544598264.311498720]: motion_name : left, step : 3.140000
[ INFO] [1544598264.311524562]: motion_name : left, step : 3.140000
[ INFO] [1544598264.311534826]: time_from_start : 6.000000
[ INFO] [1544598264.313085881]: For now, you can use publish joint trajectory msgs by triggering service(/execution)
ROSサービスでコマンドを実行するとDYNAMIXELが回転します。
$ rosservice call /dynamixel_workbench/execution "{}"
注釈: モーションを繰り返させたい場合は、引数is_loopにTrueを設定してください。
$ roslaunch dynamixel_workbench_operators joint_operator.launch is_loop:=true
パラメーターの一覧 :
-
namespace
このノードの名前空間です。 -
trajectory_info
軌道情報ファイルパスです。
トピック一覧 :
/joint_trajectory(trajectory_msgs/JointTrajectory)
DYNAMIXELを制御するために関節軌道を送ります。
サービス一覧 :
/execution(std_srvs/Trigger)
関節軌道の追従を実行するためのコマンドを送信する。
Wheel Operators
このパッケージは、ROSメッセージを作成し、コントローラに配信するためのパッケージです。
Launchコントローラーとjoint_operator
警告: コントローラーは、wheel_2_0.yaml もしくは wheel_1_0.yaml を設定し、use_cmd_vel パラメーターにtrueを設定する必要があります。
$ cd ~/catkin_ws && catkin_make
$ roslaunch dynamixel_workbench_operators wheel_operator.launch
$ roslaunch dynamixel_workbench_controllers dynamixel_controllers.launch use_cmd_vel:=true
コントローラーがDYNAMIXELを読み込むと、以下のテキストを見ることができます。
[ INFO] [1544595828.276238724]: Name : pan, ID : 1, Model Number : 1020
[ INFO] [1544595828.316198852]: Name : tilt, ID : 2, Model Number : 1020
operator launchが成功した場合、以下のテキストを見ることができます。
[ INFO] [1544600281.020523635]: You can set '-lin_vel_step' and '-ang_vel_step' arguments (default is 0.01 and 0.1)
[ INFO] [1544600281.021060063]:
Control Your Mobile Robot!
---------------------------
Moving around:
w
a s d
x
w/x : increase/decrease linear velocity
a/d : increase/decrease angular velocity
s : force stop
CTRL-C to quit
パラメーターの一覧 :
namespace
このノードの名前空間です。
トピック一覧 :
/cmd_vel(geometry_msgs/Twist)
DYNAMIXELを制御するための速度司令コマンドを送信します。
OpenCR and OpenCM Tutorials
OpenCRとOpenCMのDYNAMIXEL Workbenchのファームウェアは全く同じです。好きな例を選択して、アップロードすることができます。
警告: いくつかの例がありますが、実行する前にSerial Monitorを開く必要があります。このコード (while(!Serial)
)が有効になっている場合は、Serial Monitor
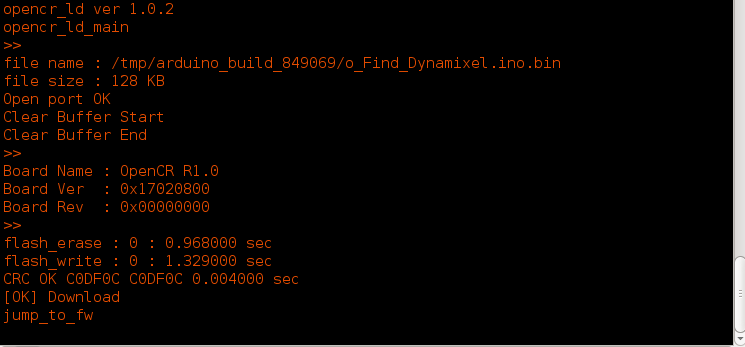
o_Find_Dynamixel
-
o_Find_Dynamixelを開きます。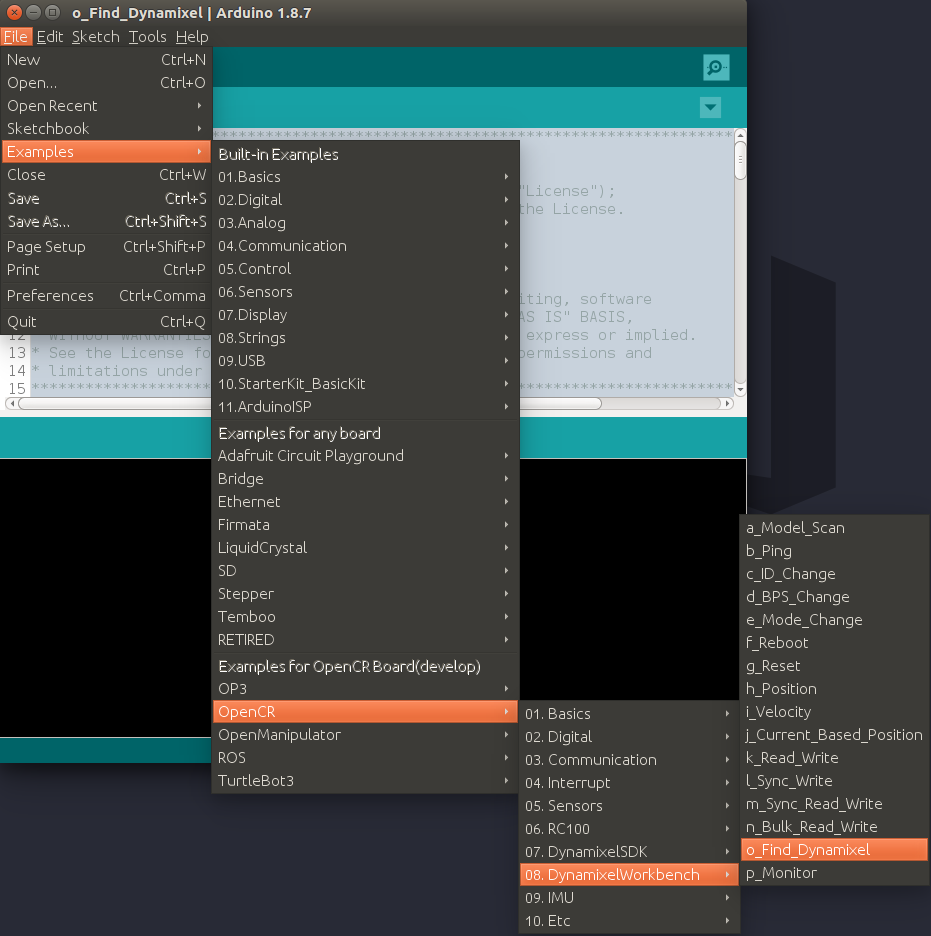
-
ポートを選択します。
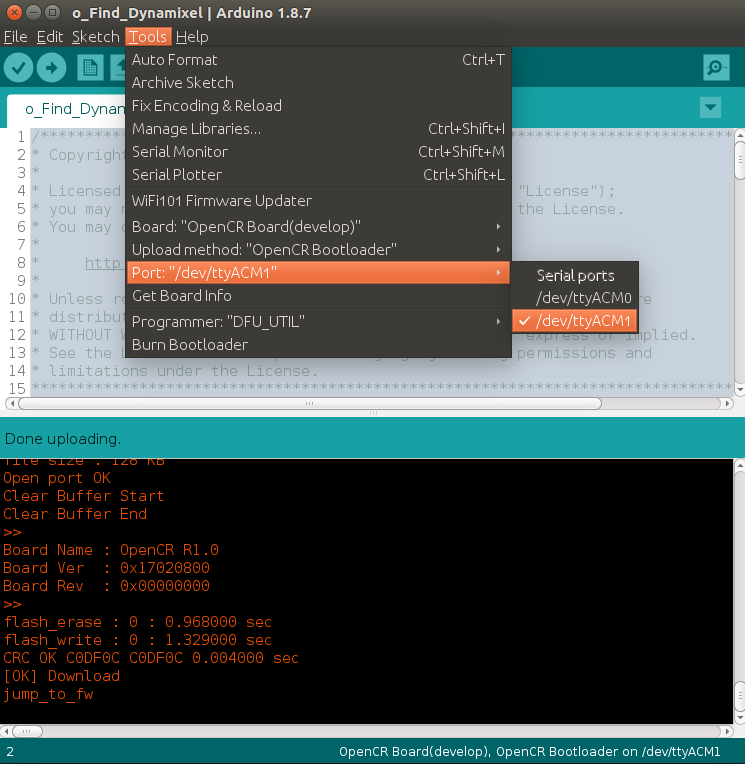
-
Uploadボタンを押すか、CTRL+Uを押します。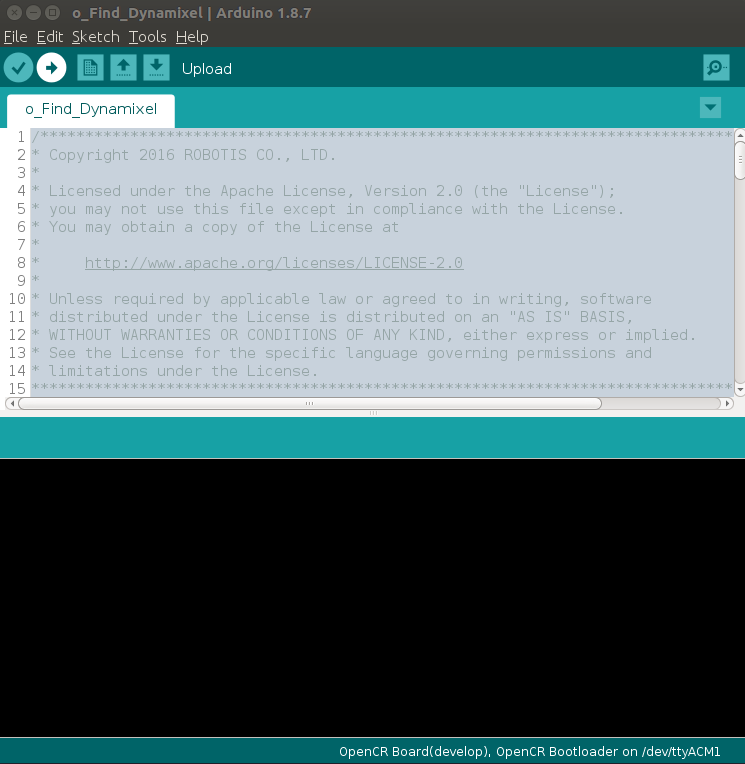
-
ファームウェアのアップロードが成功したかどうかを表示することができます。
-
Serial Monitorボタンを押します。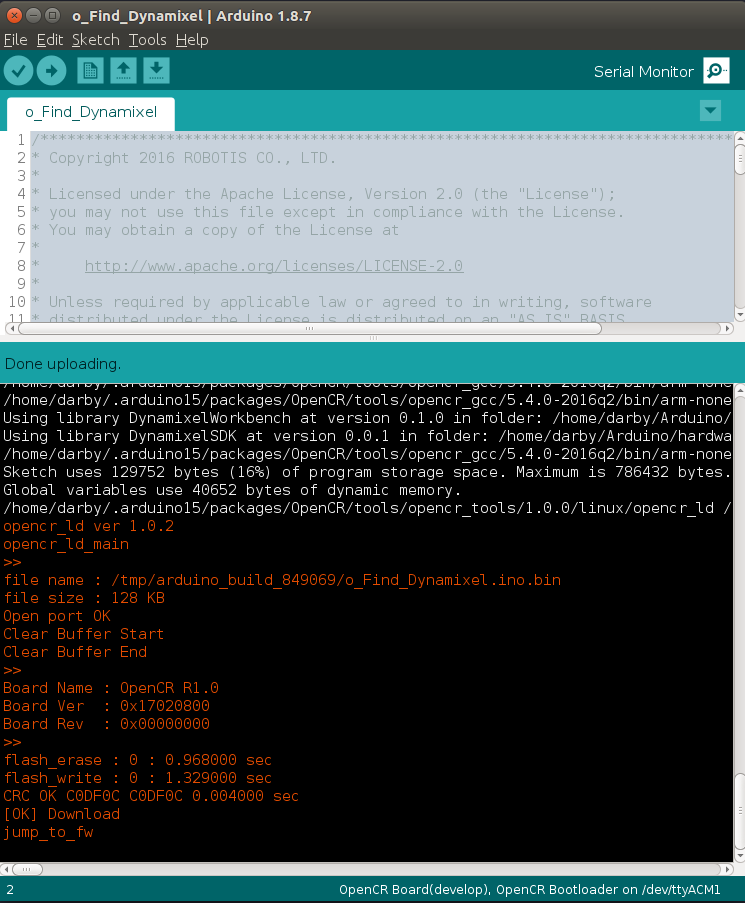
-
シリアルモニタがスキャンを開始し、DYNAMIXELを検出します。
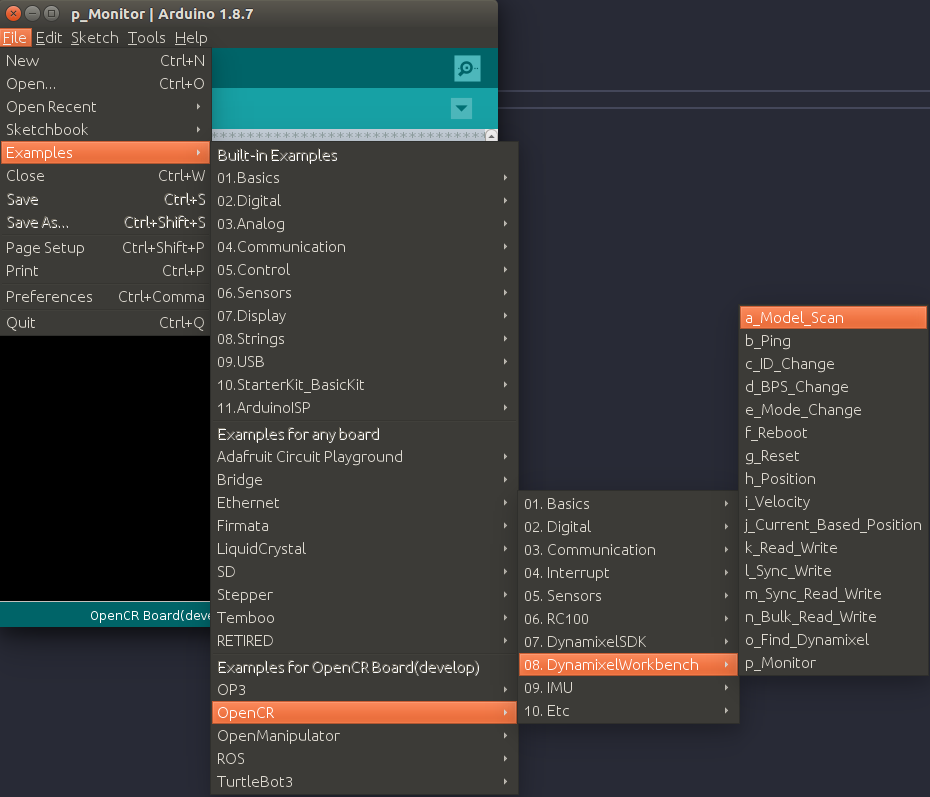
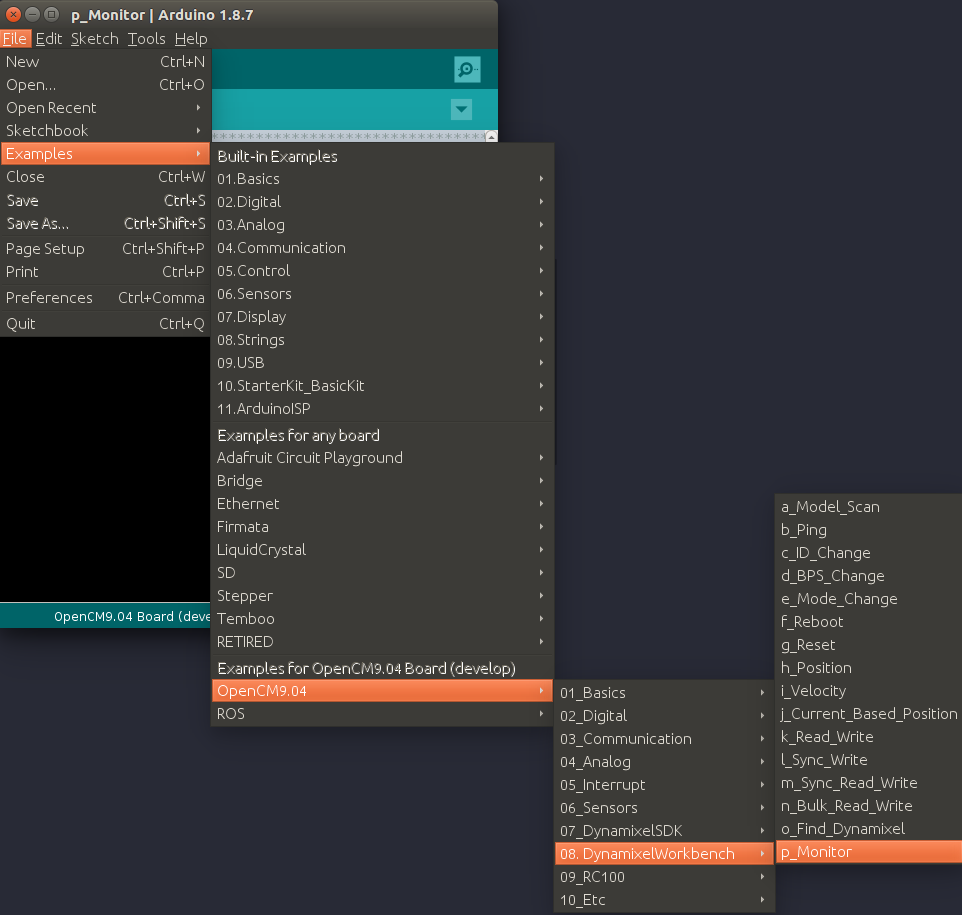
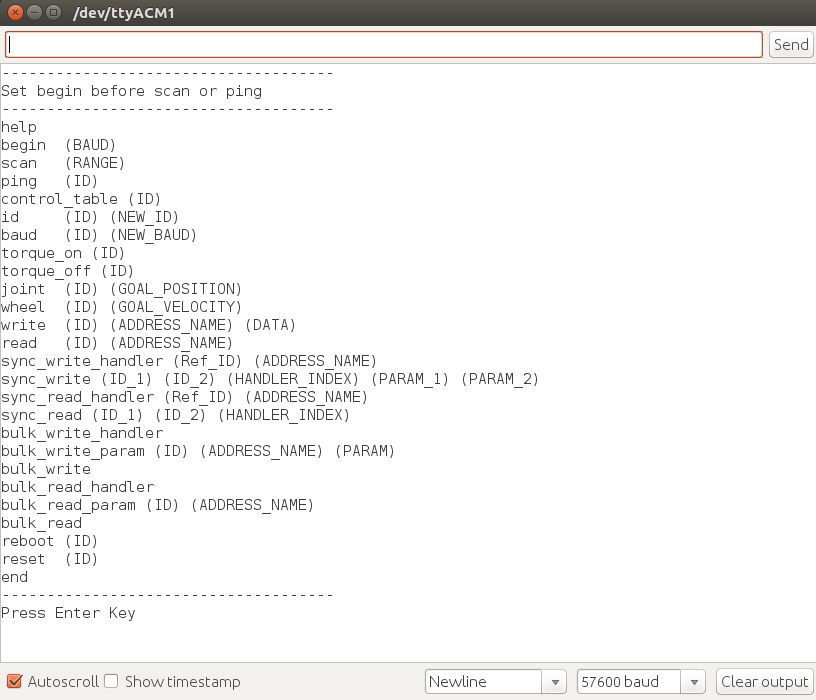
p_Monitor
-
p_Monitorを開きます。 -
ポートを選びます。
-
Uploadボタンを押すか、CTRL+Uを押します。 -
ファームウェアのアップロードが成功したかどうかを表示することができます。
-
Serial Monitorボタンを押します。 -
シリアルモニタには、DYNAMIXELモニターが表示されます。
-
begin 57600と入力します。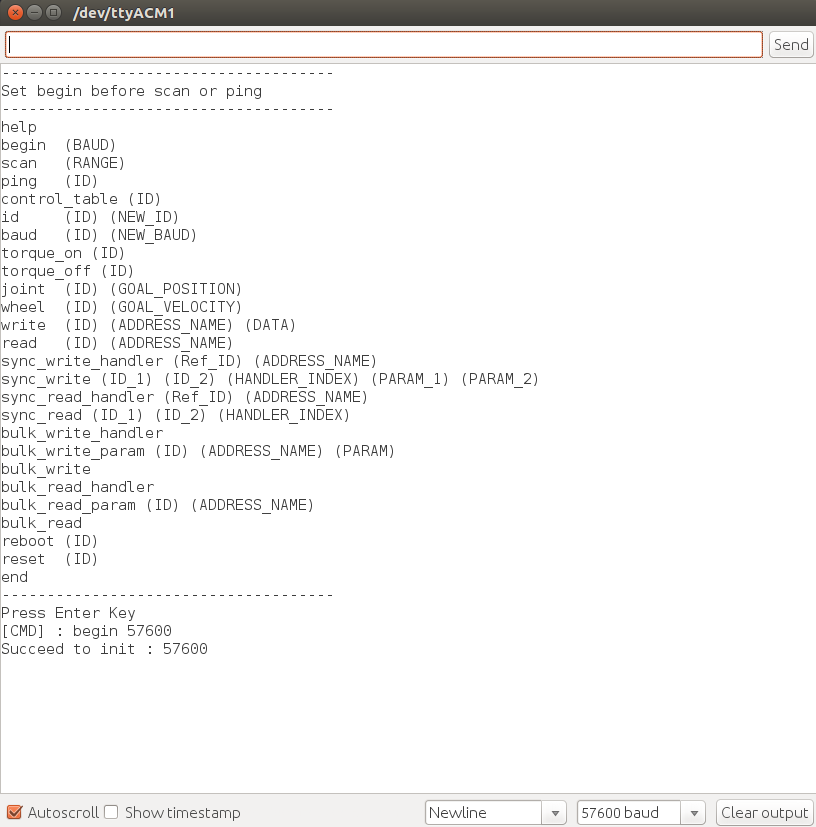
-
scan 10と入力します。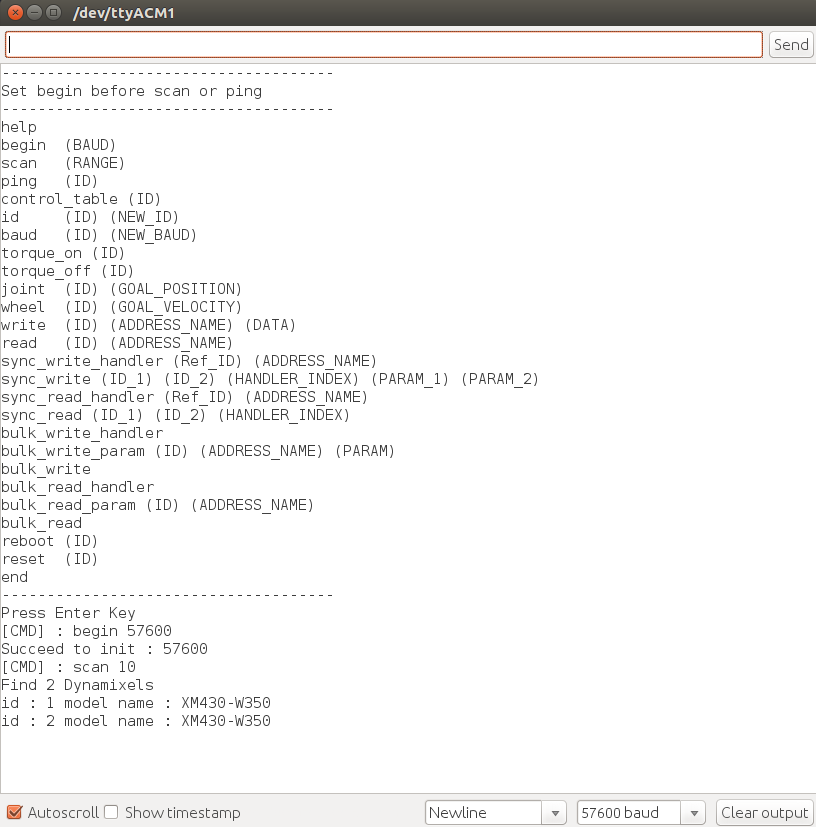
-
torque_on 1とtorque_on 2を入力します。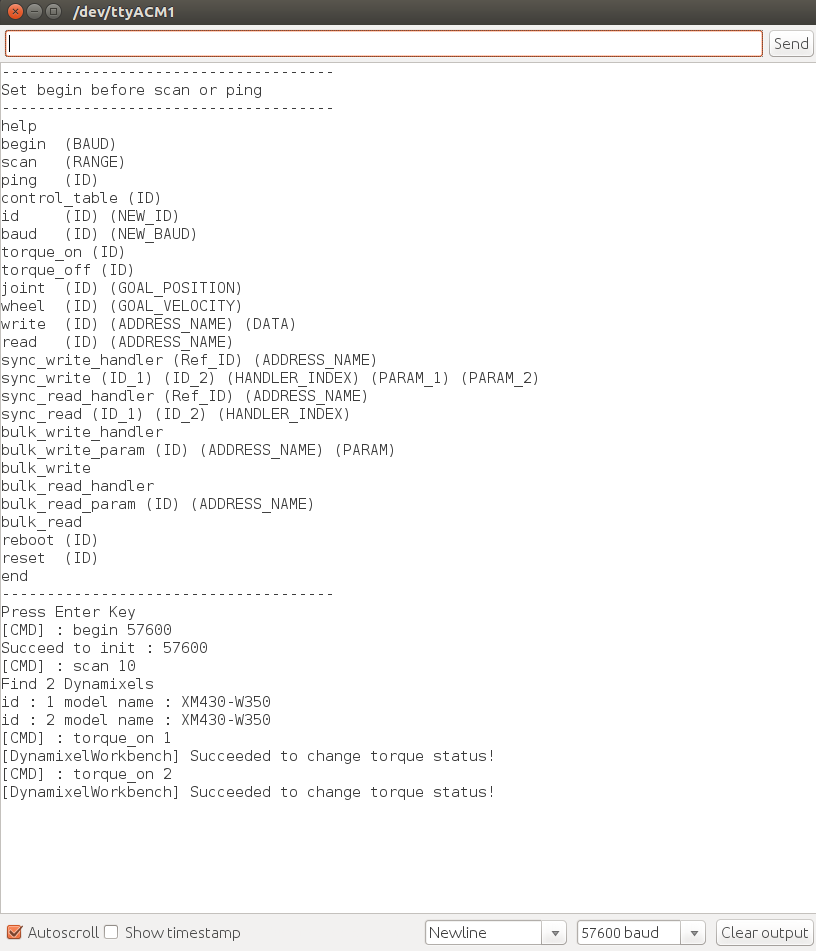
-
sync_write_handler 1 Goal_Positionと入力します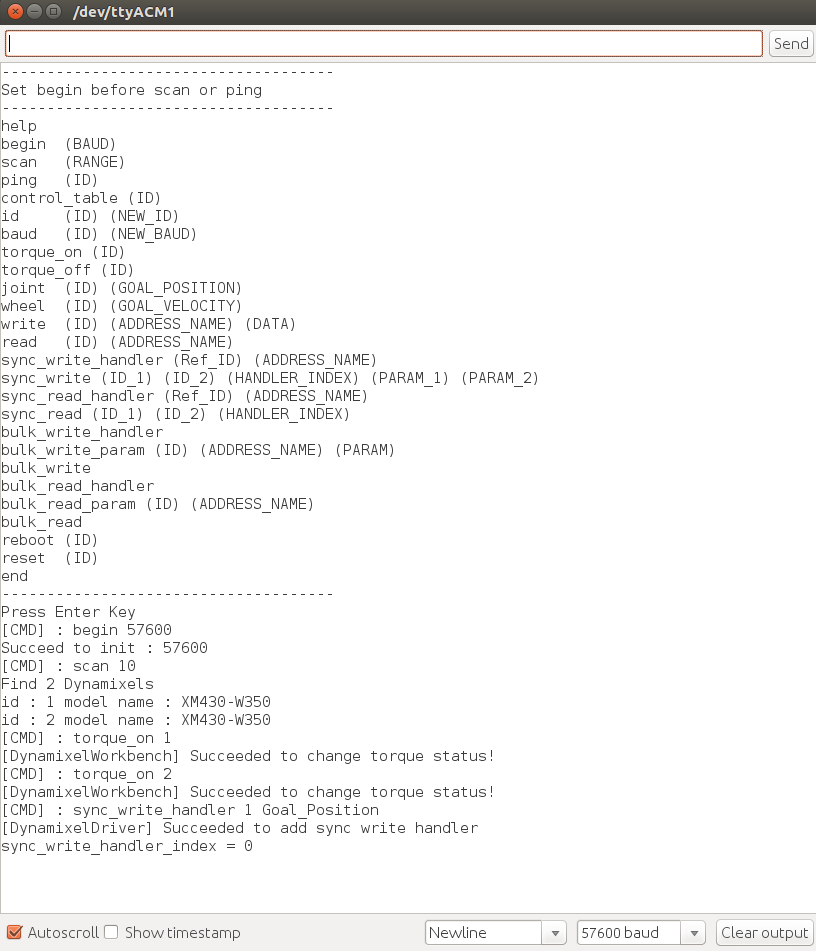
-
sync_write 1 2 0 2048 2048と入力すると、DYNAMIXELが回転します。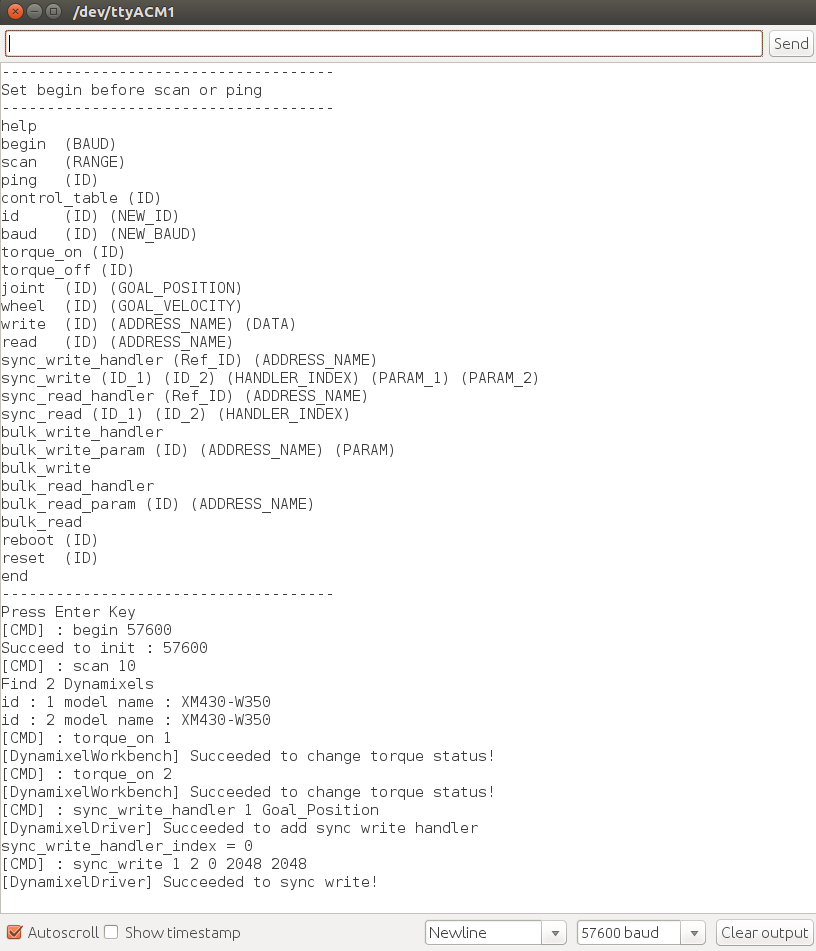
LinuxとmacOS チュートリアル
例は、任意のものを選択して表示できます。
| 例題 | |
|---|---|
| 1 | model_scan |
| 2 | ping |
| 3 | id_change |
| 4 | bps_change |
| 5 | mode_change |
| 6 | reboot |
| 7 | reset |
| 8 | position |
| 9 | velocity |
| 10 | current_based_position |
| 11 | read_write |
| 12 | sync_write |
| 13 | sync_read_write |
| 14 | bulk_read_write |
| 15 | find_dynamixel |
| 16 | monitor |
ヒント: USBポート名はOSによって異なります。例えば、Linuxでは/dev/ttyUSB0、/dev/ttyACM0となり、macOSでは/dev/cu.usbmodem1411となります。
position
-
ターミナルを開き、DYNAMIXEL Workbenchビルドフォルダに移動します。
$ cd ~/dynamixel-workbench/dynamixel_workbench_toolbox/examples/build -
positionを実行します。 (引数 : -port_name -baud_rate -dynamixel_id)
$ ./position /dev/ttyUSB0 57600 1 -
あなたは以下のようなテキストを見ることができ、DYNAMIXELは3回転します。
Succeed to init(57600) Succeed to ping id : 1, model_number : 1020 Succeed to change joint mode Dynamixel is moving...
bulk_read_write
-
ターミナルを開き、DYNAMIXEL Workbenchビルドフォルダに移動します。
$ cd ~/dynamixel-workbench/dynamixel_workbench_toolbox/examples/build -
bulk_read_writeを実行します。 (引数 : -port_name -baud_rate -dynamixel_id_1 -dynamixel_id_2)
$ ./bulk_read_write /dev/ttyUSB0 57600 1 2 -
下記テキストを見ると、DYNAMIXEL(dynamixel_id_1)回転方向を変更し、別のDYNAMIXEL(dynamixel_id_2)がLEDの状態を変更しています。
Succeed to init(57600) Succeeded to ping id : 1, model_number : 1020 Succeed to change joint mode Succeeded to ping id : 2, model_number : 1020 Succeed to change joint mode [DynamixelDriver] Succeeded to init groupBulkWrite! [DynamixelDriver] Succeeded to init groupBulkRead! [DynamixelDriver] Succeeded to add param for bulk read! [DynamixelDriver] Succeeded to add param for bulk read! [DynamixelDriver] Succeeded to add param for bulk write! [DynamixelDriver] Succeeded to add param for bulk write!
APIリファレンス
注釈: Doxygenの公開予定があります。近日中に更新します。
関数一覧
bool init(const char* device_name = "/dev/ttyUSB0",
uint32_t baud_rate = 57600,
const char **log = NULL);
bool begin(const char* device_name = "/dev/ttyUSB0",
uint32_t baud_rate = 57600,
const char **log = NULL);
bool setPortHandler(const char *device_name, const char **log = NULL);
bool setBaudrate(uint32_t baud_rate, const char **log = NULL);
bool setPacketHandler(float protocol_version, const char **log = NULL);
float getProtocolVersion(void);
uint32_t getBaudrate(void);
const char * getModelName(uint8_t id, const char **log = NULL);
uint16_t getModelNumber(uint8_t id, const char **log = NULL);
const ControlItem *getControlTable(uint8_t id, const char **log = NULL);
const ControlItem *getItemInfo(uint8_t id, const char *item_name, const char **log = NULL);
uint8_t getTheNumberOfControlItem(uint8_t id, const char **log = NULL);
const ModelInfo* getModelInfo(uint8_t id, const char **log = NULL);
uint8_t getTheNumberOfSyncWriteHandler(void);
uint8_t getTheNumberOfSyncReadHandler(void);
uint8_t getTheNumberOfBulkReadParam(void);
bool scan(uint8_t *get_id,
uint8_t *get_the_number_of_id,
uint8_t range = 253,
const char **log = NULL);
bool scan(uint8_t *get_id,
uint8_t *get_the_number_of_id,
uint8_t start_number,
uint8_t end_number,
const char **log = NULL);
bool ping(uint8_t id,
uint16_t *get_model_number,
const char **log = NULL);
bool ping(uint8_t id,
const char **log = NULL);
bool clearMultiTurn(uint8_t id, const char **log = NULL);
bool reboot(uint8_t id, const char **log = NULL);
bool reset(uint8_t id, const char **log = NULL);
bool writeRegister(uint8_t id, uint16_t address, uint16_t length, uint8_t* data, const char **log = NULL);
bool writeRegister(uint8_t id, const char *item_name, int32_t data, const char **log = NULL);
bool writeOnlyRegister(uint8_t id, uint16_t address, uint16_t length, uint8_t *data, const char **log = NULL);
bool writeOnlyRegister(uint8_t id, const char *item_name, int32_t data, const char **log = NULL);
bool readRegister(uint8_t id, uint16_t address, uint16_t length, uint32_t *data, const char **log = NULL);
bool readRegister(uint8_t id, const char *item_name, int32_t *data, const char **log = NULL);
void getParam(int32_t data, uint8_t *param);
bool addSyncWriteHandler(uint16_t address, uint16_t length, const char **log = NULL);
bool addSyncWriteHandler(uint8_t id, const char *item_name, const char **log = NULL);
bool syncWrite(uint8_t index, int32_t *data, const char **log = NULL);
bool syncWrite(uint8_t index, uint8_t *id, uint8_t id_num, int32_t *data, uint8_t data_num_for_each_id, const char **log = NULL);
bool addSyncReadHandler(uint16_t address, uint16_t length, const char **log = NULL);
bool addSyncReadHandler(uint8_t id, const char *item_name, const char **log = NULL);
bool syncRead(uint8_t index, const char **log = NULL);
bool syncRead(uint8_t index, uint8_t *id, uint8_t id_num, const char **log = NULL);
bool getSyncReadData(uint8_t index, int32_t *data, const char **log = NULL);
bool getSyncReadData(uint8_t index, uint8_t *id, uint8_t id_num, int32_t *data, const char **log = NULL);
bool getSyncReadData(uint8_t index, uint8_t *id, uint8_t id_num, uint16_t address, uint16_t length, int32_t *data, const char **log = NULL);
bool initBulkWrite(const char **log = NULL);
bool addBulkWriteParam(uint8_t id, uint16_t address, uint16_t length, int32_t data, const char **log = NULL);
bool addBulkWriteParam(uint8_t id, const char *item_name, int32_t data, const char **log = NULL);
bool bulkWrite(const char **log = NULL);
bool initBulkRead(const char **log = NULL);
bool addBulkReadParam(uint8_t id, uint16_t address, uint16_t length, const char **log = NULL);
bool addBulkReadParam(uint8_t id, const char *item_name, const char **log = NULL);
bool bulkRead(const char **log = NULL);
bool getBulkReadData(int32_t *data, const char **log = NULL);
bool getBulkReadData(uint8_t *id, uint8_t id_num, uint16_t *address, uint16_t *length, int32_t *data, const char **log = NULL);
bool clearBulkReadParam(void);
bool torque(uint8_t id, bool onoff, const char **log = NULL);
bool torqueOn(uint8_t id, const char **log = NULL);
bool torqueOff(uint8_t id, const char **log = NULL);
bool changeID(uint8_t id, uint8_t new_id, const char **log = NULL);
bool changeBaudrate(uint8_t id, uint32_t new_baudrate, const char **log = NULL);
bool changeProtocolVersion(uint8_t id, uint8_t version, const char **log = NULL);
bool itemWrite(uint8_t id, const char *item_name, int32_t data, const char **log = NULL);
bool itemRead(uint8_t id, const char *item_name, int32_t *data, const char **log = NULL);
bool led(uint8_t id, bool onoff, const char **log = NULL);
bool ledOn(uint8_t id, const char **log = NULL);
bool ledOff(uint8_t id, const char **log = NULL);
bool setNormalDirection(uint8_t id, const char **log = NULL);
bool setReverseDirection(uint8_t id, const char **log = NULL);
bool setVelocityBasedProfile(uint8_t id, const char **log = NULL);
bool setTimeBasedProfile(uint8_t id, const char **log = NULL);
bool setSecondaryID(uint8_t id, uint8_t secondary_id, const char **log = NULL);
bool setCurrentControlMode(uint8_t id, const char **log = NULL);
bool setTorqueControlMode(uint8_t id, const char **log = NULL);
bool setVelocityControlMode(uint8_t id, const char **log = NULL);
bool setPositionControlMode(uint8_t id, const char **log = NULL);
bool setExtendedPositionControlMode(uint8_t id, const char **log = NULL);
bool setMultiTurnControlMode(uint8_t id, const char **log = NULL);
bool setCurrentBasedPositionControlMode(uint8_t id, const char **log = NULL);
bool setPWMControlMode(uint8_t id, const char **log = NULL);
bool setOperatingMode(uint8_t id, uint8_t index, const char **log = NULL);
bool jointMode(uint8_t id, int32_t velocity = 0, int32_t acceleration = 0, const char **log = NULL);
bool wheelMode(uint8_t id, int32_t acceleration = 0, const char **log = NULL);
bool currentBasedPositionMode(uint8_t id, int32_t current = 0, const char **log = NULL);
bool goalPosition(uint8_t id, int32_t value, const char **log = NULL);
bool goalPosition(uint8_t id, float radian, const char **log = NULL);
bool goalVelocity(uint8_t id, int32_t value, const char **log = NULL);
bool goalVelocity(uint8_t id, float velocity, const char **log = NULL);
bool getPresentPositionData(uint8_t id, int32_t* data, const char **log = NULL);
bool getRadian(uint8_t id, float* radian, const char **log = NULL);
bool getPresentVelocityData(uint8_t id, int32_t* data, const char **log = NULL);
bool getVelocity(uint8_t id, float* velocity, const char **log = NULL);
int32_t convertRadian2Value(uint8_t id, float radian);
float convertValue2Radian(uint8_t id, int32_t value);
int32_t convertRadian2Value(float radian, int32_t max_position, int32_t min_position, float max_radian, float min_radian);
float convertValue2Radian(int32_t value, int32_t max_position, int32_t min_position, float max_radian, float min_radian);
int32_t convertVelocity2Value(uint8_t id, float velocity);
float convertValue2Velocity(uint8_t id, int32_t value);
int16_t convertCurrent2Value(float current);
float convertValue2Current(int16_t value);
float convertValue2Load(int16_t value);
関数リファレンス
bool init(const char* device_name = “/dev/ttyUSB0”, uint32_t baud_rate = 57600, const char **log = NULL)
説明文
portHandlerの初期化を行います。
引数
device_name: USBポート名を設定します。baud_rate: DYNAMIXELのボーレートを設定します。
戻り値
すべての引数が正常に設定されていれば、trueを返します。そうでない場合はfalseを返します。
bool begin(const char* device_name = “/dev/ttyUSB0”, uint32_t baud_rate = 57600, const char **log = NULL)
説明文
portHandlerの初期化を行います。
引数
device_name: USBポート名を設定します。baud_rate: DYNAMIXELのボーレートを設定します。
戻り値
すべての引数が正常に設定されていれば、trueを返します。そうでない場合はfalseを返します。
bool setPortHandler(const char *device_name, const char **log = NULL)
説明文
PortHandlerの設定をします。
引数
device_name: USBポート名を設定します。
戻り値
すべての引数が正常に設定されていれば、trueを返します。そうでない場合はfalseを返します。
bool setBaudrate(uint32_t baud_rate, const char **log = NULL)
説明文
DYNAMIXELのボーレートを設定します。
引数
baud_rate: DYNAMIXELのボーレートを設定します。
戻り値
すべての引数が正常に設定されていれば、trueを返します。そうでない場合はfalseを返します。
bool setPacketHandler(float protocol_version, const char **log = NULL)
説明文
PacketHandlerの設定を行います。
引数
protocol_version: DYNAMIXELのプロトコルバージョンを設定します。
戻り値
すべての引数が正常に設定されていれば、trueを返します。そうでない場合はfalseを返します。
float getProtocolVersion(void)
説明文
PacketHandlerのプロトコルバージョンを取得します。
引数
戻り値
PacketHandlerのプロトコルバージョンを返します。
uint32_t getBaudrate(void)
説明文
PortHandlerのボーレートを取得します。
引数
戻り値
PortHandlerのボーレートを返します。
const char * getModelName(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELのモデル名を取得します。
引数
id: DYNAMIXELのIDを設定します。
戻り値 。 型番を返します。
uint16_t getModelNumber(uint8_t id, const char **log = NULL)
Description
DYNAMIXELの型番を取得します。
Input
id: DYNAMIXELのIDを設定します。
戻り値
型番を返します。
const ControlItem *getControlTable(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELのコントロールテーブル(ID、ボーレート、目標位置、…を含む)を取得します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
コントロールテーブルを返します。
const ControlItem *getItemInfo(uint8_t id, const char *item_name, const char **log = NULL)
説明文
DYNAMIXELのコントロールテーブルのアイテム情報を取得します。
引数
id: DYNAMIXELのIDを設定します。item_name: コントロールテーブルの項目名です。
戻り値
項目情報を返します。
uint8_t getTheNumberOfControlItem(uint8_t id, const char **log = NULL)
説明文
制御項目の数を取得します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
制御項目の数を返します。
const ModelInfo* getModelInfo(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELのモデル情報(RPM、最小/最大位置など)を取得します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
モデル情報を返します。
uint8_t getTheNumberOfSyncWriteHandler(void)
説明文
同期書き込みハンドラの数を取得します。
引数
戻り値
同期書き込みハンドラの数を返します。
uint8_t getTheNumberOfSyncReadHandler(void)
説明文
同期書き込みハンドラの数を取得します。
引数
戻り値
同期書き込みハンドラの数を返します。
uint8_t getTheNumberOfBulkReadParam(void)
説明文
bulk readパラメーターの数を取得します。
引数
戻り値
bulk readパラメーターの数を返します。
bool scan(uint8_t *get_id, uint8_t *get_the_number_of_id, uint8_t range = 253, const char **log = NULL)
説明文
指定範囲のDYNAMIXELへPingを送ります。 Pingが成功した場合、DYNAMIXELの全ての情報が保存されます。
引数
get_id: 検出したIDを取得します。get_the_number_of_id: 検出したIDの数を取得します。range: スキャン範囲を設定します。(0から始まります)
戻り値
ping命令が正常に動作した場合はtrueを返します。そうでない場合はfalseを返します。
bool scan(uint8_t *get_id, uint8_t *get_the_number_of_id, uint8_t start_number, uint8_t end_number, const char **log = NULL)
説明文
特定の範囲間でDYNAMIXELをPingします。Pingが成功した場合、DYNAMIXELの全ての情報が保存されます。
引数
get_id: 検出したIDを取得します。get_the_number_of_id: 検出したIDの数を取得します。start_number: pingの開始番号を設定します。end_number: pingの終了番号を設定します。
戻り値
ping命令が正常に動作した場合はtrueを返します。そうでない場合はfalseを返します。
bool ping(uint8_t id, uint16_t *get_model_number, const char **log = NULL)
説明文
DYNAMIXELへPingを送ります。Pingが成功すると、DYNAMIXELのすべての情報が保存されます。
引数
id: IDを設定します。get_model_number: pingされたDYNAMIXELの型番を取得します。
戻り値
ping命令が正常に動作した場合はtrueを返します。そうでない場合はfalseを返します。
bool ping(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELへPingを送ります。Pingが成功すると、DYNAMIXELのすべての情報が保存されます。
引数
id: IDを設定します。
戻り値
ping命令が正常に動作した場合はtrueを返します。そうでない場合はfalseを返します。
bool clearMultiTurn(uint8_t id, const char **log = NULL)
説明文
マルチターンのクリア命令を送信します。
引数
id: IDを設定します。
戻り値
マルチターンのクリアが正常に動作した場合はtrueを返します。そうでない場合はfalseを返します。
bool reboot(uint8_t id, const char **log = NULL)
説明文
再起動命令を送信します。
引数
id: IDを設定します。
戻り値
再起動命令が正常に動作した場合はtrueを返します。そうでない場合はfalseを返します。
bool reset(uint8_t id, const char **log = NULL)
説明文
リセット命令を送信します。
引数
id: IDを設定します。
戻り値
リセット命令が正常に動作した場合はtrueを返します。そうでない場合はfalseを返します。
bool writeRegister(uint8_t id, uint16_t address, uint16_t length, uint8_t* data, const char **log = NULL)
Description
DYNAMIXELにデータを書き込み、書き込み完了信号を待ちます。
引数
id: IDを設定します。address: コントロールテーブル項目のアドレスを設定する。length: コントロールテーブル項目の長さを設定する。data: データを設定します。
戻り値
writeTxRx命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool writeRegister(uint8_t id, const char *item_name, int32_t data, const char **log = NULL)
Description
DYNAMIXELにデータを書き込み、書き込み完了信号を待ちます。
引数
id: IDを設定します。item_name: コントロールテーブルの項目名を設定します。(例:目標位置、目標速度、…)data: データを設定します。
戻り値
writeTxRx命令が正常に動作した場合はtrueを返します。そうでない場合はfalseを返します。
bool writeOnlyRegister(uint8_t id, uint16_t address, uint16_t length, uint8_t *data, const char **log = NULL)
説明文
DYNAMIXELにデータを書き込むだけです。他の信号を待ちません。
引数
id: IDを設定します。address: コントロールテーブル項目のアドレスを設定します。length: コントロールテーブル項目の長さを設定します。data: データを設定します。
戻り値
writeTxOnly命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool writeOnlyRegister(uint8_t id, const char *item_name, int32_t data, const char **log = NULL)
説明文
DYNAMIXELにデータを書き込むだけです。他の信号を待ちません。
引数
id: IDを設定します。item_name: コントロールテーブルの項目名を設定します。(例:目標位置、目標速度、…)data: データを設定します。
戻り値
writeTxOnly命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool readRegister(uint8_t id, uint16_t address, uint16_t length, uint32_t *data, const char **log = NULL)
説明文
DYNAMIXELからデータを読み出します。
引数
id: IDを設定します。address: コントロールテーブルの項目名を設定します。length: コントロールテーブル項目の長さを設定します。data: データを取得します。
戻り値
readTxRx命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool readRegister(uint8_t id, const char *item_name, int32_t *data, const char **log = NULL)
説明文
DYNAMIXELからデータを読み出します。
引数
id: IDを設定します。item_name: コントロールテーブルの項目名を設定します。(例:目標位置、目標速度、…)data: データを取得します。
戻り値
readTxRx命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
void getParam(int32_t data, uint8_t *param)
説明文
32ビットデータを8ビットパラメーターに変換します。
引数
data: 32ビットのデータを設定します。param: 8ビットのパラメーターを取得します。
戻り値
bool addSyncWriteHandler(uint16_t address, uint16_t length, const char **log = NULL)
説明文
syncWriteハンドラを追加します。
引数
address: コントロールテーブル項目のアドレスを設定します。length: コントロールテーブル項目の長さを設定します。
戻り値
syncWriteハンドラを最大値(デフォルトは5)を超えて追加しようとした場合はfalseを返します。そうでない場合にはtrueを返します。
bool addSyncWriteHandler(uint8_t id, const char *item_name, const char **log = NULL)
説明文
syncWriteハンドラを追加します。
引数
id: コントロールテーブルを参照するためのDYNAMIXELのIDを設定します。item_name: コントロールテーブルの項目名を設定します。(例;目標位置、目標速度、…)
戻り値
syncWriteハンドラを最大値(デフォルトは5)を超えて追加しようとした場合はfalseを返す、もしくは項目名が見つからなくなります。そうでない場合にはtrueを返します。
bool syncWrite(uint8_t index, int32_t *data, const char **log = NULL)
説明文
全てのpingされたDYNAMIXELに同期書き込みを実行します。
引数
index: syncWriteハンドラのインデックスを設定します。data: データを設定します。
戻り値
addパラメーターまたはtxtパケット命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool syncWrite(uint8_t index, uint8_t *id, uint8_t id_num, int32_t *data, uint8_t data_num_for_each_id, const char **log = NULL)
説明文
いくつかのDYNAMIXELへの同期書き込みを実行します。
引数
index: syncWriteハンドラのインデックスを設定します。id: IDを設定します。id_num: IDの数を設定します。data: データを設定します。data_num_for_each_id: 各IDのデータ数を設定します。
戻り値
addパラメーターまたはtxパケット命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool addSyncReadHandler(uint16_t address, uint16_t length, const char **log = NULL)
説明文
syncReadハンドラを追加します。
引数
address: コントロールテーブル項目のアドレスを設定します。length: コントロールテーブル項目の長さを設定します。
戻り値
syncWriteハンドラの最大値(デフォルトは5)を超えて追加しようとした場合はfalseを返す、もしくは項目名が見つからなくなります。そうでない場合にはtrueを返します。
bool addSyncReadHandler(uint8_t id, const char *item_name, const char **log = NULL)
説明文
syncReadハンドラを追加します。
引数
id: コントロールテーブルを参照するためのDYNAMIXELのIDを設定します。item_name: コントロールテーブルの項目名を設定します。(例:目標位置、目標速度、…)
戻り値
syncWriteハンドラを最大値(デフォルトは5)を超えて追加しようとした場合はfalseを返す、もしくは項目名が見つからなくなります。そうでない場合にはtrueを返します。
bool syncRead(uint8_t index, const char **log = NULL)
説明文
全てのpingされたDYNAMIXELからの同期読み出しを実行します。
引数
index: syncWriteハンドラのインデックスを設定します。
戻り値
addパラメーターまたはtxパケット命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool syncRead(uint8_t index, uint8_t *id, uint8_t id_num, const char **log = NULL)
説明文
いくつかのDYNAMIXELからの同期読み出しを実行します。
引数
index: syncWriteハンドラのインデックスを設定します。id: IDを設定します。id_num: IDの数を設定します。
戻り値
addパラメーターまたはtxパケット命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool getSyncReadData(uint8_t index, int32_t *data, const char **log = NULL)
説明文
全てのpingされたDYNAMIXELに同期書き込みを実行します。
引数
index: syncWriteハンドラのインデックスを設定します。data: データを取得します。
Output
isAvailable命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool getSyncReadData(uint8_t index, uint8_t *id, uint8_t id_num, int32_t *data, const char **log = NULL)
説明文
いくつかのDYNAMIXELからsyncRead関数で読み込んだデータを取得します。
引数
index: syncWriteハンドラのインデックスを設定します。id: IDを設定します。id_num: IDの数を設定します。data: データを取得します。
戻り値
isAvailable命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool getSyncReadData(uint8_t index, uint8_t *id, uint8_t id_num, uint16_t address, uint16_t length, int32_t *data, const char **log = NULL)
説明文
いくつかのDYNAMIXELからsyncRead関数で読み込んだデータを取得します。
引数
index: syncWriteハンドラのインデックスを設定します。id: IDを設定します。id_num: IDの数を設定します。address: コントロールテーブル項目のアドレスを設定します。length: コントロールテーブル項目の長さを設定します。data: データを取得します。
戻り値
isAvailable命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool initBulkWrite(const char **log = NULL)
説明文
bulkWriteハンドラを初期化します。
引数
戻り値
ポートハンドラとパケットハンドラが正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool addBulkWriteParam(uint8_t id, uint16_t address, uint16_t length, int32_t data, const char **log = NULL)
説明文
bulkWrite用のパラメーターを追加します。
引数
id: IDを設定する。address: コントロールテーブル項目のアドレスを設定します。length: コントロールテーブル項目の長さを設定します。data: データを設定します。
戻り値
addParam命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool addBulkWriteParam(uint8_t id, const char *item_name, int32_t data, const char **log = NULL)
説明文
bulkWrite用のパラメーターを追加します。
引数
id: コントロールテーブルを参照するためのDYNAMIXELのIDを設定します。item_name: コントロールテーブルの項目名を設定します。(例:目標位置、目標速度、…)data: データを設定します。
戻り値
addParam命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool bulkWrite(const char **log = NULL)
説明文
bulkWriteを実行します。
引数
戻り値
txパケット命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool initBulkRead(const char **log = NULL)
説明文
bulkReadハンドラを初期化します。
引数
戻り値
ポートハンドラとパケットハンドラが正常にロードされた場合はtrueを返します。そうでない場合にはfalseを返します。
bool addBulkReadParam(uint8_t id, uint16_t address, uint16_t length, const char **log = NULL)
説明文
bulkRead用のパラメーターを追加します。
引数
id: IDを設定します。address: コントロールテーブル項目のアドレスを設定します。length: コントロールテーブル項目の長さを設定します。data: データを設定します。
戻り値
addParam命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool addBulkReadParam(uint8_t id, const char *item_name, const char **log = NULL)
説明文
bulkRead用のパラメーターを追加します。
引数
id: コントロールテーブルを参照するためのDYNAMIXELのIDを設定します。item_name: コントロールテーブルの項目名を設定します。(例:目標位置、目標速度、…)data: データを設定します。
戻り値
addParam命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool bulkRead(const char **log = NULL)
説明文
bulkReadを実行します。
引数
戻り値
txパケット命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool getBulkReadData(int32_t *data, const char **log = NULL)
説明文
pingされた全てのDYNAMIXELからbulkRead関数で読み込んだデータを取得します。
引数
data: データを設定します。
戻り値
isAvailable命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool getBulkReadData(uint8_t *id, uint8_t id_num, uint16_t *address, uint16_t *length, int32_t *data, const char **log = NULL)
説明文
いくつかのDYNAMIXELからbulkRead関数で読み込んだデータを取得します。
Input
id: IDを設定します。id_num: IDの数を設定します。address: コントロールテーブル項目のアドレスを設定します。length: コントロールテーブル項目の長さを設定します。data: データを取得します。
戻り値
isAvailable命令が正常に動作した場合はtrueを返します。そうでない場合にはfalseを返します。
bool clearBulkReadParam(void)
説明文
bulkRead用の全てのパラメーターをクリアします。
引数
戻り値
パラメーターのクリア命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool torque(uint8_t id, bool onoff, const char **log = NULL)
説明文
DYNAMIXELにトルクを設定します。
引数
id: DYNAMIXELのIDを設定します。onoff: trueかfalseかを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool torqueOn(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELのトルクをオンに設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool torqueOff(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELのトルクをオフに設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool changeID(uint8_t id, uint8_t new_id, const char **log = NULL)
説明文
DYNAMIXELのIDを変更します。
引数
id: DYNAMIXELのIDを設定します。new_id: DYNAMIXELの新しいIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool changeBaudrate(uint8_t id, uint32_t new_baudrate, const char **log = NULL)
説明文
DYNAMIXELのボーレートを変更します。
引数
id: DYNAMIXELのIDを設定します。new_baudrate: DYNAMIXELの新しいボーレートを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool changeProtocolVersion(uint8_t id, uint8_t version, const char **log = NULL)
説明文
DYNAMIXELのプロトコルバージョンを変更します。
引数
id: DYNAMIXELのIDを設定します。version: DYNAMIXELのプロトコルバージョンを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool itemWrite(uint8_t id, const char *item_name, int32_t data, const char **log = NULL)
説明文
コントロールテーブルの項目にデータを書き込みます。
引数
id: DYNAMIXELのIDを設定します。item_name: コントロールテーブルの項目名を設定します。(例:目標位置、目標速度、…)data: データを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool itemRead(uint8_t id, const char *item_name, int32_t *data, const char **log = NULL)
説明文
コントロールテーブルの項目へデータを読み込みます。
引数
id: DYNAMIXELのIDを設定します。item_name: コントロールテーブルの項目名を設定します。(例:目標位置、目標速度、…)data: データを取得します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool led(uint8_t id, bool onoff, const char **log = NULL)
説明文
DYNAMIXELのLEDをオンもしくはオフに設定します。
引数
id: DYNAMIXELのIDを設定します。onoff: trueもしくはfalseかを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool ledOn(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELのLEDをオンに設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool ledOff(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELのLEDをオンもしくはオフに設定します。
引数
id: DYNAMIXELのIDを設定します。onoff: trueもしくはfalseかを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setNormalDirection(uint8_t id, const char **log = NULL)
Description
DYNAMIXELを通常の方向(反時計回り)に回転するように設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setReverseDirection(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELを逆回転(時計回り)するように設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setVelocityBasedProfile(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELに速度ベースのプロファイルを設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setTimeBasedProfile(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELにタイムベースのプロファイルを設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setSecondaryID(uint8_t id, uint8_t secondary_id, const char **log = NULL)
説明文
セカンダリIDを設定します。
引数
id: DYNAMIXELのIDを設定します。secondary_id: DYNAMIXELのセカンダリIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setCurrentControlMode(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELを電流制御モードに設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setTorqueControlMode(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELをトルク制御モードに設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setVelocityControlMode(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELを速度制御モードに設定します。
引数
id: DYNAMIXELのIDを設定する。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setPositionControlMode(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELを位置制御モードに設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setExtendedPositionControlMode(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELを拡張位置制御モードに設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setMultiTurnControlMode(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELをマルチターン制御モードに設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setCurrentBasedPositionControlMode(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELに電流による位置制御モードを設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setPWMControlMode(uint8_t id, const char **log = NULL)
説明文
DYNAMIXELをPWM制御モードに設定します。
引数
id: DYNAMIXELのIDを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool setOperatingMode(uint8_t id, uint8_t index, const char **log = NULL)
説明文
DYNAMIXELに動作モードを設定します。
引数
id: DYNAMIXELのIDを設定します。index: 設定したい動作モードを選択します。
- インデックス一覧
static const uint8_t CURRENT_CONTROL_MODE = 0; static const uint8_t VELOCITY_CONTROL_MODE = 1; static const uint8_t POSITION_CONTROL_MODE = 3; static const uint8_t EXTENDED_POSITION_CONTROL_MODE = 4; static const uint8_t CURRENT_BASED_POSITION_CONTROL_MODE = 5; static const uint8_t PWM_CONTROL_MODE = 16; static const uint8_t TORQUE_CONTROL_MODE = 100; static const uint8_t MULTI_TURN_MODE = 101;
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool jointMode(uint8_t id, int32_t velocity = 0, int32_t acceleration = 0, const char **log = NULL)
説明文
DYNAMIXELにジョイントモードを設定します。任意のDYNAMIXELにジョイントモードを簡単に設定することができます。ジョイントモードが正常に設定されると、トルクがオンになります。
速度と加速度のパラメーターは、プロファイルを作成する際の引数として使用されます。
引数
id: DYNAMIXELのIDを設定します。velocity: 速度プロファイルを設定します。acceleration: 加速度プロファイルを設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool wheelMode(uint8_t id, int32_t acceleration = 0, const char **log = NULL)
説明文
DYNAMIXELに車輪モードを設定します。任意のDYNAMIXELに車輪モードを簡単に設定することができます。車輪モードが正常に設定されると、トルクがオンになります。
加速度のパラメーターは、プロファイルを作成する際の引数として使用されます。
引数
id: DYNAMIXELのIDを設定します。acceleration: プロファイルの加速度を設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool currentBasedPositionMode(uint8_t id, int32_t current = 0, const char **log = NULL)
説明文
DYNAMIXELに電流による位置制御モードを設定します。DYNAMIXEL-Xシリーズに電流によって制御されるジョイントモードを簡単に設定することができます。モードが正常に設定されると、トルクがオンになります。
プロファイルを作成する際には、電流のパラメーターが引数として使用されます。
引数
id: DYNAMIXELのIDを設定します。current: 電流値の制限を設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool goalPosition(uint8_t id, int32_t value, const char **log = NULL)
説明文
DYNAMIXELに位置を設定します。
引数
id: DYNAMIXELのIDを設定します。value: 32ビットのraw値を設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool goalPosition(uint8_t id, float radian, const char **log = NULL)
説明文
DYNAMIXELに位置を設定します。
引数
id: DYNAMIXELのIDを設定します。radian: 位置を設定します。単位はラジアンです。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool goalVelocity(uint8_t id, int32_t value, const char **log = NULL)
説明文
DYNAMIXELに速度を設定します。
引数
id: DYNAMIXELのIDを設定します。value: 32ビットのraw値を設定します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool goalVelocity(uint8_t id, float velocity, const char **log = NULL)
説明文
DYNAMIXELに速度を設定します。
引数
id: DYNAMIXELのIDを設定します。velocity: 速度を設定します。単位はm/sです。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool getPresentPositionData(uint8_t id, int32_t* data, const char **log = NULL)
説明文
DYNAMIXELから現在の位置を取得します。
引数
id: DYNAMIXELのIDを設定します。data: 32ビットのraw値を取得します。
戻り
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool getRadian(uint8_t id, float* radian, const char **log = NULL)
説明文
DYNAMIXELから現在の位置を取得します。
引数
id: DYNAMIXELのIDを設定します。radian: 位置を設定します。単位はラジアンです。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool getPresentVelocityData(uint8_t id, int32_t* data, const char **log = NULL)
説明文
DYNAMIXELから現在の位置を取得します。
引数
id: DYNAMIXELのIDを設定します。data: 32ビットのraw値を取得します。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
bool getVelocity(uint8_t id, float* velocity, const char **log = NULL)
説明文
DYNAMIXELから現在の位置を取得します。
引数
id: DYNAMIXELのIDを設定します。velocity: 速度を設定します。単位はm/sです。
戻り値
writeByteTxRx命令が正常に動作した場合はtureを返します。そうでない場合にはfalseを返します。
int32_t convertRadian2Value(uint8_t id, float radian)
説明文
ラジアンを32ビットのraw値に変換します。
引数
id: DYNAMIXELのIDを設定します。radian: 位置を設定します。単位はラジアンです。
戻り値
DYNAMIXEL用の32ビットのraw値を返します。
float convertValue2Radian(uint8_t id, int32_t value)
説明文
ラジアンを32ビットのraw値に変換します。
引数
id: DYNAMIXELのIDを設定します。value: 32ビットのraw値を取得します。
戻り値
位置を返します。単位はラジアンです。
int32_t convertRadian2Value(float radian, int32_t max_position, int32_t min_position, float max_radian, float min_radian)
説明文
ラジアンを32ビットのraw値に変換します。
引数
radian: 位置を設定します。単位はラジアンです。max_position: 最大位置を設定します。単位は32ビットraw値です。min_position: 最小位置を設定します。単位は32ビットraw値です。max_radian: 最大ラジアンを設定します。min_radian: 最小ラジアンを設定します。
戻り値
ラジアンを32ビットのraw値に変換します。
float convertValue2Radian(int32_t value, int32_t max_position, int32_t min_position, float max_radian, float min_radian)
説明文
32ビットのraw値をラジアンに変換します。
引数
value: 32ビットのraw値を設定します。max_position: 最大位置を設定します。単位は32ビットraw値です。min_position: 最小位置を設定します。単位は32ビットraw値です。max_radian: 最大ラジアンを設定します。min_radian: 最小ラジアンを設定します。
戻り値
位置を返します。単位はラジアンです。
int32_t convertVelocity2Value(uint8_t id, float velocity)
説明文
速度を32ビットのraw値に変換します。
引数
id: DYNAMIXELのIDを設定します。velocity: 速度を設定します。単位はm/sです。
戻り値
32ビットのraw値を返します。
float convertValue2Velocity(uint8_t id, int32_t value)
説明文
32ビットのraw値を速度に変換します。
引数
id: DYNAMIXELのIDを設定します。value: 32ビットのraw値を設定します。
戻り値
速度を返します。単位はm/sです。
int16_t convertCurrent2Value(float current)
説明文
電流を16ビットのraw値に変換します。
引数
current: 電流を設定します。単位はm/Aです。
戻り値
16ビットのraw値を返します。
float convertValue2Current(int16_t value)
説明文
16ビットのraw値を電流に変換します。
引数
value: 16ビットのraw値を設定します。
戻り値
電流を返します。単位はm/Aです。
float convertValue2Load(int16_t value)
説明文
16ビットのraw値をロードに変換します。
引数
value: 16ビットのraw値を設定します。
戻り値
負荷を返します。単位は%です。