
Controller
The OpenMANIPULATOR-X controller has been restructured to utilize the ros2_control framework and MoveIt for enhanced flexibility, modularity, and usability. This updated controller allows for seamless integration with ROS 2-based systems, offering advanced features such as trajectory planning, real-time control, and state feedback.
NOTE:
- Make sure ROS 2 Jazzy dependencies are installed before performing these instructions
- Install ROS Packages
- Docker installation is recommended for ROS 2 Jazzy
The OpenMANIPULATOR-X controller has been restructured to utilize the ros2_control framework and MoveIt for enhanced flexibility, modularity, and usability. This updated controller allows for seamless integration with ROS 2-based systems, offering advanced features such as trajectory planning, real-time control, and state feedback.
NOTE:
- Make sure ROS dependencies are installed before performing these instructions. - Install ROS Packages
The open_manipulator_controller package created by ROBOTIS helps to control each joint of OpenMANIPULATOR-X and to check the status of OpenMANIPULATOR-X through ROS messages.
In order to operate the OpenMANIPULATOR-X, the controller package should be running in the first place.
Other experimental controllers are available in the Experimental section.
NOTE:
- Make sure that dependent packages are installed before performing these instructions - Install ROS Packages
Arduino sketch for OpenCR OpenMANIPULATOR-X includes the controller in the code.
Launch Controller
Open a new terminal and launch the OM packages for ROS 2 Jazzy.
- When operating with
U2D2
Close all terminal and enter the command below in each new terminal.$ ros2 launch open_manipulator_bringup open_manipulator_x.launch.py - When operating with
OpenCR
Close all terminals and enter the command below in the new terminal.$ ros2 launch open_manipulator_bringup open_manipulator_x.launch.py port_name:=/dev/ttyACM0
WARNING :
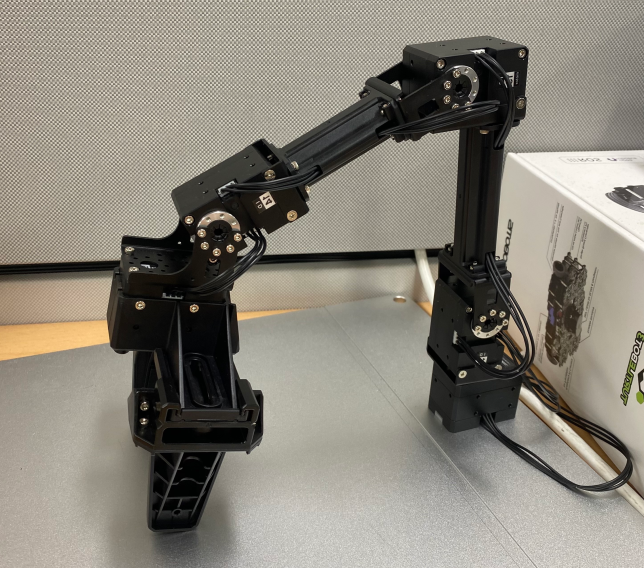
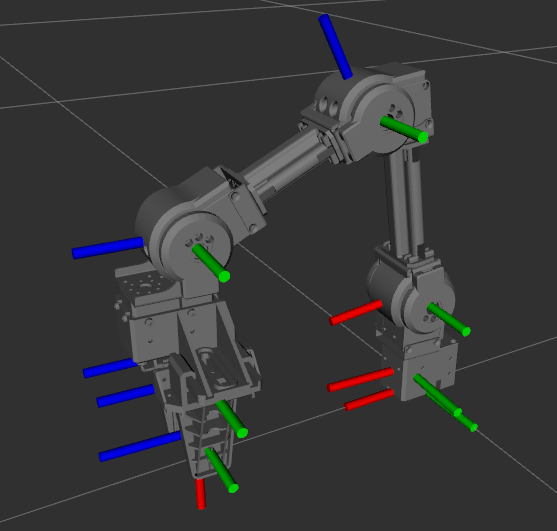
Please check each joint position before running open_manipulator_x. The manipulator will not operate if any joint is out of operable range.
The following image describes the recommended pose of open_manipulator_x at start up. Please adjust the pose before the torque is turned on by the controller.
Following message will be shown in the Terminal after the process done successfully with U2D2.
$ ros2 launch open_manipulator_bringup open_manipulator_x.launch.py
[INFO] [launch]: All log files can be found below
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ros2_control_node-1]: process started with pid [507]
[INFO] [spawner-2]: process started with pid [508]
[INFO] [robot_state_publisher-3]: process started with pid [509]
[robot_state_publisher-3] [INFO] [1751511730.728706299] [robot_state_publisher]: Robot initialized
[ros2_control_node-1] [INFO] [1751511730.747902102] [controller_manager]: Using Steady (Monotonic) clock for triggering controller manager cycles.
[ros2_control_node-1] [INFO] [1751511730.750710518] [controller_manager]: Subscribing to '/robot_description' topic for robot description.
[ros2_control_node-1] [INFO] [1751511730.761789183] [controller_manager]: update rate is 100 Hz
[ros2_control_node-1] [INFO] [1751511730.761860000] [controller_manager]: Spawning controller_manager RT thread with scheduler priority: 50
[ros2_control_node-1] [INFO] [1751511730.761941839] [controller_manager]: Successful set up FIFO RT scheduling policy with priority 50.
[spawner-2] [INFO] [1751511730.877470892] [spawner_arm_controller]: waiting for service /controller_manager/list_controllers to become available...
[ros2_control_node-1] [INFO] [1751511730.884559092] [controller_manager]: Received robot description from topic.
[ros2_control_node-1] [INFO] [1751511730.888920790] [controller_manager]: Loading hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1751511730.893746698] [controller_manager]: Loaded hardware 'OpenManipulatorXSystem' from plugin 'dynamixel_hardware_interface/DynamixelHardware'
[ros2_control_node-1] [INFO] [1751511730.893797909] [controller_manager]: Initialize hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] transmission_to_joint_matrix_
[ros2_control_node-1] [0][0] 1.000000, [0][1] 0.000000, [0][2] 0.000000, [0][3] 0.000000, [0][4] 0.000000,
[ros2_control_node-1] [1][0] 0.000000, [1][1] 1.000000, [1][2] 0.000000, [1][3] 0.000000, [1][4] 0.000000,
[ros2_control_node-1] [2][0] 0.000000, [2][1] 0.000000, [2][2] 1.000000, [2][3] 0.000000, [2][4] 0.000000,
[ros2_control_node-1] [3][0] 0.000000, [3][1] 0.000000, [3][2] 0.000000, [3][3] 1.000000, [3][4] 0.000000,
[ros2_control_node-1] [4][0] 0.000000, [4][1] 0.000000, [4][2] 0.000000, [4][3] 0.000000, [4][4] 1.000000,
[ros2_control_node-1] joint_to_transmission_matrix_
[ros2_control_node-1] [0][0] 1.000000, [0][1] 0.000000, [0][2] 0.000000, [0][3] 0.000000, [0][4] 0.000000,
[ros2_control_node-1] [1][0] 0.000000, [1][1] 1.000000, [1][2] 0.000000, [1][3] 0.000000, [1][4] 0.000000,
[ros2_control_node-1] [2][0] 0.000000, [2][1] 0.000000, [2][2] 1.000000, [2][3] 0.000000, [2][4] 0.000000,
[ros2_control_node-1] [3][0] 0.000000, [3][1] 0.000000, [3][2] 0.000000, [3][3] 1.000000, [3][4] 0.000000,
[ros2_control_node-1] [4][0] 0.000000, [4][1] 0.000000, [4][2] 0.000000, [4][3] 0.000000, [4][4] 1.000000,
[ros2_control_node-1] [INFO] [1751511730.893931204] [dynamixel_hardware_interface]: Torque will be disabled during initialization if it is enabled at initialization.
[ros2_control_node-1] [INFO] [1751511730.893939425] [dynamixel_hardware_interface]: port_name /dev/ttyUSB0 / baudrate 1000000
[ros2_control_node-1] Dynamixel Information File List.
[ros2_control_node-1] num: 220, name: omy_hat.model
[ros2_control_node-1] num: 230, name: omy_end.model
[ros2_control_node-1] num: 231, name: omy_end_rh_p12_rn.model
[ros2_control_node-1] num: 350, name: xl320.model
[ros2_control_node-1] num: 536, name: sensorxel_joy.model
[ros2_control_node-1] num: 537, name: ffw_g40_imu.model
[ros2_control_node-1] num: 600, name: sensorxel_joy.model
[ros2_control_node-1] num: 601, name: ffw_g10_led.model
[ros2_control_node-1] num: 602, name: ffw_g10_rcu.model
[ros2_control_node-1] num: 620, name: ffw_sg2_steer_1.model
[ros2_control_node-1] num: 621, name: ffw_sg2_steer_2.model
[ros2_control_node-1] num: 622, name: ffw_sg2_steer_3.model
[ros2_control_node-1] num: 623, name: ffw_sg2_drive_1.model
[ros2_control_node-1] num: 624, name: ffw_sg2_drive_2.model
[ros2_control_node-1] num: 625, name: ffw_sg2_drive_3.model
[ros2_control_node-1] num: 1000, name: xh430_w350.model
[ros2_control_node-1] num: 1001, name: xd430_t350.model
[ros2_control_node-1] num: 1010, name: xh430_w210.model
[ros2_control_node-1] num: 1011, name: xd430_t210.model
[ros2_control_node-1] num: 1020, name: xm430_w350.model
[ros2_control_node-1] num: 1030, name: xm430_w210.model
[ros2_control_node-1] num: 1040, name: xh430_v350.model
[ros2_control_node-1] num: 1050, name: xh430_v210.model
[ros2_control_node-1] num: 1060, name: xl430_w250.model
[ros2_control_node-1] num: 1070, name: xc430_w150.model
[ros2_control_node-1] num: 1070, name: xc430_w150.model
[ros2_control_node-1] num: 1080, name: xc430_w240.model
[ros2_control_node-1] num: 1080, name: xc430_w240.model
[ros2_control_node-1] num: 1090, name: 2xl430_w250.model
[ros2_control_node-1] num: 1100, name: xh540_w270.model
[ros2_control_node-1] num: 1101, name: xd540_t270.model
[ros2_control_node-1] num: 1110, name: xh540_w150.model
[ros2_control_node-1] num: 1111, name: xd540_t150.model
[ros2_control_node-1] num: 1120, name: xm540_w270.model
[ros2_control_node-1] num: 1130, name: xm540_w150.model
[ros2_control_node-1] num: 1140, name: xh540_v270.model
[ros2_control_node-1] num: 1150, name: xh540_v150.model
[ros2_control_node-1] num: 1160, name: 2xc430_w250.model
[ros2_control_node-1] num: 1170, name: xw540_t260.model
[ros2_control_node-1] num: 1180, name: xw540_t140.model
[ros2_control_node-1] num: 1190, name: xl330_m077.model
[ros2_control_node-1] num: 1200, name: xl330_m288.model
[ros2_control_node-1] num: 1210, name: xc330_t181.model
[ros2_control_node-1] num: 1220, name: xc330_t288.model
[ros2_control_node-1] num: 1230, name: xc330_m181.model
[ros2_control_node-1] num: 1240, name: xc330_m288.model
[ros2_control_node-1] num: 1270, name: xw430_t333.model
[ros2_control_node-1] num: 1310, name: xw540_h260.model
[ros2_control_node-1] num: 2000, name: ph42_020_s300.model
[ros2_control_node-1] num: 4000, name: ym070_210_m001.model
[ros2_control_node-1] num: 4020, name: ym070_210_r051.model
[ros2_control_node-1] num: 4030, name: ym070_210_r099.model
[ros2_control_node-1] num: 4050, name: ym070_210_a099.model
[ros2_control_node-1] num: 4120, name: ym080_230_m001.model
[ros2_control_node-1] num: 4130, name: ym080_230_b001.model
[ros2_control_node-1] num: 4140, name: ym080_230_r051.model
[ros2_control_node-1] num: 4150, name: ym080_230_r099.model
[ros2_control_node-1] num: 4170, name: ym080_230_a099.model
[ros2_control_node-1] num: 35074, name: rh_p12_rn.model
[ros2_control_node-1] [INFO] [1751511730.894147174] [dynamixel_hardware_interface]: $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$
[ros2_control_node-1] [INFO] [1751511730.894151067] [dynamixel_hardware_interface]: $$$$$ Init Dxl Comm Port
[ros2_control_node-1] [INFO] [1751511730.894153757] [dynamixel_hardware_interface]: Revolute to Prismatic gripper conversion enabled.
[ros2_control_node-1] [INFO] [1751511730.894171984] [dynamixel_hardware_interface]: $$$$$ Init Items for type: controller
[ros2_control_node-1] [INFO] [1751511730.894174743] [dynamixel_hardware_interface]: $$$$$ Init Items for type: virtual_dxl
[ros2_control_node-1] Succeeded to open the port!
[ros2_control_node-1] Succeeded to change the [1000000] baudrate!
[ros2_control_node-1] [ID:011] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [WARN] Model file '/root/ros2_ws/install/dynamixel_hardware_interface/share/dynamixel_hardware_interface/param/dxl_model/xm430_w350.model' doesn't contain torque_constant parameter. Using default value: 1.0
[ros2_control_node-1] [ID:012] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [WARN] Model file '/root/ros2_ws/install/dynamixel_hardware_interface/share/dynamixel_hardware_interface/param/dxl_model/xm430_w350.model' doesn't contain torque_constant parameter. Using default value: 1.0
[ros2_control_node-1] [ID:013] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [WARN] Model file '/root/ros2_ws/install/dynamixel_hardware_interface/share/dynamixel_hardware_interface/param/dxl_model/xm430_w350.model' doesn't contain torque_constant parameter. Using default value: 1.0
[ros2_control_node-1] [ID:014] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [WARN] Model file '/root/ros2_ws/install/dynamixel_hardware_interface/share/dynamixel_hardware_interface/param/dxl_model/xm430_w350.model' doesn't contain torque_constant parameter. Using default value: 1.0
[ros2_control_node-1] [ID:015] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [WARN] Model file '/root/ros2_ws/install/dynamixel_hardware_interface/share/dynamixel_hardware_interface/param/dxl_model/xm430_w350.model' doesn't contain torque_constant parameter. Using default value: 1.0
[ros2_control_node-1] [INFO] [1751511730.900250607] [dynamixel_hardware_interface]: Trying to connect to the communication port...
[ros2_control_node-1] [InitTorqueStates][ID:011] Current torque state: OFF
[ros2_control_node-1] [InitTorqueStates][ID:012] Current torque state: OFF
[ros2_control_node-1] [InitTorqueStates][ID:013] Current torque state: OFF
[ros2_control_node-1] [InitTorqueStates][ID:014] Current torque state: OFF
[ros2_control_node-1] [InitTorqueStates][ID:015] Current torque state: OFF
[ros2_control_node-1] [INFO] [1751511730.905232373] [dynamixel_hardware_interface]: $$$$$ Init Items for type: dxl
[ros2_control_node-1] [INFO] [1751511730.905347714] [dynamixel_hardware_interface]: [ID:11] item_name:Operating Mode data:3
[ros2_control_node-1] [INFO] [1751511730.906187489] [dynamixel_hardware_interface]: [ID:11] item_name:Return Delay Time data:0
[ros2_control_node-1] [INFO] [1751511730.907182981] [dynamixel_hardware_interface]: [ID:11] item_name:Position D Gain data:100
[ros2_control_node-1] [INFO] [1751511730.908203072] [dynamixel_hardware_interface]: [ID:11] item_name:Position I Gain data:100
[ros2_control_node-1] [INFO] [1751511730.909194354] [dynamixel_hardware_interface]: [ID:11] item_name:Position P Gain data:800
[ros2_control_node-1] [INFO] [1751511730.910140678] [dynamixel_hardware_interface]: [ID:11] item_name:Drive Modedata:4
[ros2_control_node-1] [INFO] [1751511730.911139093] [dynamixel_hardware_interface]: [ID:11] item_name:Profile Velocity data:20
[ros2_control_node-1] [INFO] [1751511730.912117370] [dynamixel_hardware_interface]: [ID:11] item_name:Profile Acceleration data:10
[ros2_control_node-1] [INFO] [1751511730.913152937] [dynamixel_hardware_interface]: [ID:12] item_name:Operating Mode data:3
[ros2_control_node-1] [INFO] [1751511730.914154019] [dynamixel_hardware_interface]: [ID:12] item_name:Return Delay Time data:0
[ros2_control_node-1] [INFO] [1751511730.915441921] [dynamixel_hardware_interface]: [ID:12] item_name:Position D Gain data:100
[ros2_control_node-1] [INFO] [1751511730.916190531] [dynamixel_hardware_interface]: [ID:12] item_name:Position I Gain data:100
[ros2_control_node-1] [INFO] [1751511730.917392144] [dynamixel_hardware_interface]: [ID:12] item_name:Position P Gain data:800
[ros2_control_node-1] [INFO] [1751511730.918170651] [dynamixel_hardware_interface]: [ID:12] item_name:Drive Modedata:4
[ros2_control_node-1] [INFO] [1751511730.919339480] [dynamixel_hardware_interface]: [ID:12] item_name:Profile Velocity data:20
[ros2_control_node-1] [INFO] [1751511730.920219221] [dynamixel_hardware_interface]: [ID:12] item_name:Profile Acceleration data:10
[ros2_control_node-1] [INFO] [1751511730.921832480] [dynamixel_hardware_interface]: [ID:13] item_name:Operating Mode data:3
[ros2_control_node-1] [INFO] [1751511730.923520106] [dynamixel_hardware_interface]: [ID:13] item_name:Return Delay Time data:0
[ros2_control_node-1] [INFO] [1751511730.924213100] [dynamixel_hardware_interface]: [ID:13] item_name:Position D Gain data:100
[ros2_control_node-1] [INFO] [1751511730.925160103] [dynamixel_hardware_interface]: [ID:13] item_name:Position I Gain data:100
[ros2_control_node-1] [INFO] [1751511730.926225284] [dynamixel_hardware_interface]: [ID:13] item_name:Position P Gain data:800
[ros2_control_node-1] [INFO] [1751511730.927171515] [dynamixel_hardware_interface]: [ID:13] item_name:Drive Modedata:4
[ros2_control_node-1] [INFO] [1751511730.928279270] [dynamixel_hardware_interface]: [ID:13] item_name:Profile Velocity data:20
[ros2_control_node-1] [INFO] [1751511730.929607782] [dynamixel_hardware_interface]: [ID:13] item_name:Profile Acceleration data:10
[ros2_control_node-1] [INFO] [1751511730.930252442] [dynamixel_hardware_interface]: [ID:14] item_name:Operating Mode data:3
[ros2_control_node-1] [INFO] [1751511730.931156296] [dynamixel_hardware_interface]: [ID:14] item_name:Return Delay Time data:0
[ros2_control_node-1] [INFO] [1751511730.932183611] [dynamixel_hardware_interface]: [ID:14] item_name:Position D Gain data:100
[ros2_control_node-1] [INFO] [1751511730.933156544] [dynamixel_hardware_interface]: [ID:14] item_name:Position I Gain data:100
[ros2_control_node-1] [INFO] [1751511730.934184448] [dynamixel_hardware_interface]: [ID:14] item_name:Position P Gain data:800
[ros2_control_node-1] [INFO] [1751511730.935138086] [dynamixel_hardware_interface]: [ID:14] item_name:Drive Modedata:4
[ros2_control_node-1] [INFO] [1751511730.936149154] [dynamixel_hardware_interface]: [ID:14] item_name:Profile Velocity data:20
[ros2_control_node-1] [INFO] [1751511730.937148882] [dynamixel_hardware_interface]: [ID:14] item_name:Profile Acceleration data:10
[ros2_control_node-1] [INFO] [1751511730.938194626] [dynamixel_hardware_interface]: [ID:15] item_name:Operating Mode data:5
[ros2_control_node-1] [INFO] [1751511730.939251278] [dynamixel_hardware_interface]: [ID:15] item_name:Goal Current data:200
[ros2_control_node-1] [INFO] [1751511730.940347115] [dynamixel_hardware_interface]: [ID:15] item_name:Return Delay Time data:0
[ros2_control_node-1] [INFO] [1751511730.941168094] [dynamixel_hardware_interface]: [ID:15] item_name:Drive Modedata:4
[ros2_control_node-1] [INFO] [1751511730.942196843] [dynamixel_hardware_interface]: [ID:15] item_name:Profile Velocity data:20
[ros2_control_node-1] [INFO] [1751511730.943168462] [dynamixel_hardware_interface]: [ID:15] item_name:Profile Acceleration data:10
[ros2_control_node-1] [INFO] [1751511730.944137719] [dynamixel_hardware_interface]: $$$$$ Init Items for type: sensor
[ros2_control_node-1] [INFO] [1751511730.944197533] [dynamixel_hardware_interface]: $$$$$ Init Dxl Read Items
[ros2_control_node-1] Dynamixel Read Type : sync read
[ros2_control_node-1] ID : 11, 12, 13, 14, 15,
[ros2_control_node-1] Read items : Present Position Present Velocity Present Current
[ros2_control_node-1] set fast sync read (indirect addr) : addr 634, size 10
[ros2_control_node-1] FastSyncRead handler set up successfully.
[ros2_control_node-1] Success to set SyncRead handler using indirect address
[ros2_control_node-1] [INFO] [1751511730.995224936] [dynamixel_hardware_interface]: $$$$$ Init Dxl Write Items
[ros2_control_node-1] Dynamixel Write Type : sync write
[ros2_control_node-1] ID : 11, 12, 13, 14, 15,
[ros2_control_node-1] Write items : Goal Position
[ros2_control_node-1] set sync write (indirect addr) : addr 224, size 4
[ros2_control_node-1] Success to set SyncWrite handler using indirect address
[ros2_control_node-1] [INFO] [1751511731.020262878] [controller_manager]: Successful initialization of hardware 'OpenManipulatorXSystemSystem'
[ros2_control_node-1] [INFO] [1751511731.020618988] [resource_manager]: 'configure' hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1751511731.020631268] [resource_manager]: Successful 'configure' of hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1751511731.020641833] [resource_manager]: 'activate' hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1751511731.022185727] [dynamixel_hardware_interface]: Sync joint state to command (joint: joint1, position, -0.0659612 <- position, -0.0659612
[ros2_control_node-1] [INFO] [1751511731.022225647] [dynamixel_hardware_interface]: Sync joint state to command (joint: joint2, position, -2.0632 <- position, -2.0632
[ros2_control_node-1] [INFO] [1751511731.022240619] [dynamixel_hardware_interface]: Sync joint state to command (joint: joint3, position, 1.48408 <- position, 1.48408
[ros2_control_node-1] [INFO] [1751511731.022253290] [dynamixel_hardware_interface]: Sync joint state to command (joint: joint4, position, 0.658399 <- position, 0.658399
[ros2_control_node-1] [INFO] [1751511731.022265799] [dynamixel_hardware_interface]: Sync joint state to command (joint: gripper_left_joint, position, -0.00975459 <- position, -0.00975459
[ros2_control_node-1] [INFO] [1751511731.022335076] [dynamixel_hardware_interface]: Enabling torque for Dynamixels
[ros2_control_node-1] [ID:011] Torque ON
[ros2_control_node-1] [ID:012] Torque ON
[ros2_control_node-1] [ID:013] Torque ON
[ros2_control_node-1] [ID:014] Torque ON
[ros2_control_node-1] [ID:015] Torque ON
[ros2_control_node-1] [INFO] [1751511731.027148696] [dynamixel_hardware_interface]: Dynamixel Hardware Start!
[ros2_control_node-1] [INFO] [1751511731.027197173] [resource_manager]: Successful 'activate' of hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1751511731.027289507] [controller_manager]: Resource Manager has been successfully initialized. Starting Controller Manager services...
[ros2_control_node-1] [INFO] [1751511731.131317160] [controller_manager]: Loading controller : 'arm_controller' of type 'joint_trajectory_controller/JointTrajectoryController'
[ros2_control_node-1] [INFO] [1751511731.131411607] [controller_manager]: Loading controller 'arm_controller'
[ros2_control_node-1] [INFO] [1751511731.138269320] [controller_manager]: Controller 'arm_controller' node arguments: --ros-args --params-file /tmp/launch_params_6_4c_95z --params-file /root/ros2_ws/install/open_manipulator_bringup/share/open_manipulator_bringup/config/open_manipulator_x/hardware_controller_manager.yaml
[spawner-2] [INFO] [1751511731.166336939] [spawner_arm_controller]: Loaded arm_controller
[ros2_control_node-1] [INFO] [1751511731.167789273] [controller_manager]: Configuring controller: 'arm_controller'
[ros2_control_node-1] [INFO] [1751511731.168277922] [arm_controller]: No specific joint names are used for command interfaces. Using 'joints' parameter.
[ros2_control_node-1] [INFO] [1751511731.168374878] [arm_controller]: Command interfaces are [position] and state interfaces are [position velocity].
[ros2_control_node-1] [INFO] [1751511731.168456153] [arm_controller]: Using 'splines' interpolation method.
[ros2_control_node-1] [INFO] [1751511731.177301345] [arm_controller]: Goals with partial set of joints are allowed
[ros2_control_node-1] [INFO] [1751511731.177343642] [arm_controller]: Action status changes will be monitored at 20.00 Hz.
[ros2_control_node-1] [INFO] [1751511731.186044591] [controller_manager]: Activating controllers: [ arm_controller ]
[ros2_control_node-1] [INFO] [1751511731.195066882] [controller_manager]: Successfully switched controllers!
[spawner-2] [INFO] [1751511731.207877250] [spawner_arm_controller]: Configured and activated arm_controller
[ros2_control_node-1] [INFO] [1751511731.209499839] [controller_manager]: Loading controller : 'gripper_controller' of type 'position_controllers/GripperActionController'
[ros2_control_node-1] [INFO] [1751511731.209555286] [controller_manager]: Loading controller 'gripper_controller'
[ros2_control_node-1] [INFO] [1751511731.212216025] [controller_manager]: Controller 'gripper_controller' node arguments: --ros-args --params-file /tmp/launch_params_6_4c_95z --params-file /root/ros2_ws/install/open_manipulator_bringup/share/open_manipulator_bringup/config/open_manipulator_xhardware_controller_manager.yaml
[ros2_control_node-1] [WARN] [1751511731.226791266] [gripper_controller]: [Deprecated]: the `position_controllers/GripperActionController` and `effort_controllers::GripperActionController` controllers are replaced by 'parallel_gripper_controllers/GripperActionController' controller
[spawner-2] [INFO] [1751511731.236574535] [spawner_arm_controller]: Loaded gripper_controller
[ros2_control_node-1] [INFO] [1751511731.237004610] [controller_manager]: Configuring controller: 'gripper_controller'
[ros2_control_node-1] [INFO] [1751511731.237095162] [gripper_controller]: Action status changes will be monitored at 20.000000 Hz.
[ros2_control_node-1] [INFO] [1751511731.245319729] [controller_manager]: Activating controllers: [ gripper_controller ]
[ros2_control_node-1] [INFO] [1751511731.259740129] [controller_manager]: Successfully switched controllers!
[spawner-2] [INFO] [1751511731.266792295] [spawner_arm_controller]: Configured and activated gripper_controller
[ros2_control_node-1] [INFO] [1751511731.268632209] [controller_manager]: Loading controller : 'joint_state_broadcaster' of type 'joint_state_broadcaster/JointStateBroadcaster'
[ros2_control_node-1] [INFO] [1751511731.268729088] [controller_manager]: Loading controller 'joint_state_broadcaster'
[ros2_control_node-1] [INFO] [1751511731.272768326] [controller_manager]: Controller 'joint_state_broadcaster' node arguments: --ros-args --params-file /tmp/launch_params_6_4c_95z --params-file /root/ros2_ws/install/open_manipulator_bringup/share/open_manipulator_bringup/config/open_manipulator_x/hardware_controller_manager.yaml
[spawner-2] [INFO] [1751511731.297833178] [spawner_arm_controller]: Loaded joint_state_broadcaster
[ros2_control_node-1] [INFO] [1751511731.298434771] [controller_manager]: Configuring controller: 'joint_state_broadcaster'
[ros2_control_node-1] [INFO] [1751511731.298554879] [joint_state_broadcaster]: 'joints' or 'interfaces' parameter is empty. All available state interfaces will be published
[ros2_control_node-1] [INFO] [1751511731.316553372] [controller_manager]: Activating controllers: [ joint_state_broadcaster ]
[ros2_control_node-1] [INFO] [1751511731.324710178] [controller_manager]: Successfully switched controllers!
[spawner-2] [INFO] [1751511731.338744310] [spawner_arm_controller]: Configured and activated joint_state_broadcaster
[INFO] [spawner-2]: process has finished cleanly [pid 508]
[INFO] [joint_trajectory_executor-4]: process started with pid [569]
[joint_trajectory_executor-4] [INFO] [1751511731.696890011] [joint_trajectory_executor]: Waiting for action server...
[joint_trajectory_executor-4] [INFO] [1751511731.697313456] [joint_trajectory_executor]: Action server available
[joint_trajectory_executor-4] [INFO] [1751511731.697640734] [joint_trajectory_executor]: Using action topic: /arm_controller/follow_joint_trajectory
[joint_trajectory_executor-4] [INFO] [1751511731.697971862] [joint_trajectory_executor]: Using joint states topic: /joint_states
[joint_trajectory_executor-4] [INFO] [1751511731.698562007] [joint_trajectory_executor]: Moving to step 0 target positions
[joint_trajectory_executor-4] [INFO] [1751511731.700120844] [joint_trajectory_executor]: Sending goal...
[ros2_control_node-1] [INFO] [1751511731.700814287] [arm_controller]: Received new action goal
[ros2_control_node-1] [INFO] [1751511731.700872911] [arm_controller]: Accepted new action goal
[joint_trajectory_executor-4] [INFO] [1751511731.701565531] [joint_trajectory_executor]: Goal accepted :)
[joint_trajectory_executor-4] [INFO] [1751511734.495847960] [joint_trajectory_executor]: 🎯 Step 0 completed!
[joint_trajectory_executor-4] [INFO] [1751511734.504799146] [joint_trajectory_executor]: All steps completed!
[INFO] [joint_trajectory_executor-4]: process has finished cleanly [pid 569]
[ros2_control_node-1] [INFO] [1751511734.694509356] [arm_controller]: Goal reached, success!
TIP:
- If you can’t load DYNAMIXEL, please check firmware to use ROBOTIS software (DYNAMIXEL Wizard 2.0)
- Docker installation is recommended for ROS 2 Jazzy
NOTE: open_manipulator_x controller is compatible with Protocol 2.0 which supports MX 2.0, X and Pro series. Protocol 1.0 does not support SyncRead instructions to access to multiple DYNAMIXEL’s’s simultaneously.
Open a new terminal and launch the open_manipulator_x packages.
- When operating with
U2D2
Close all terminal and enter the command below in each new terminal.$ ros2 launch open_manipulator_x_bringup hardware.launch.py - When operating with
OpenCR
Close all terminal and enter the command below in the new terminal.$ ros2 launch open_manipulator_x_bringup hardware.launch.py port_name:=/dev/ttyACM0
WARNING :
Please check each joint position before running OpenMANIPULATOR-X. The manipulator will not operate if any joint is out of operable range.
The following image describes the recommended pose of OpenMANIPULATOR-X at start up. Please adjust the pose before the torque is turned on by the controller.
Follwing message will be shown in the Terminal after the process done successfully with U2D2.
$ ros2 launch open_manipulator_x_bringup hardware.launch.py
[INFO] [launch]: All log files can be found below /home/open_manipulator_x/.ros/log/2024-12-10-16-13-03-846807-open_manipulator_x-3063
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [ros2_control_node-1]: process started with pid [3066]
[INFO] [robot_state_publisher-2]: process started with pid [3068]
[INFO] [spawner-3]: process started with pid [3070]
[robot_state_publisher-2] [INFO] [1733814784.140348781] [robot_state_publisher]: got segment dummy_mimic_fix
[robot_state_publisher-2] [INFO] [1733814784.140441706] [robot_state_publisher]: got segment end_effector_link
[robot_state_publisher-2] [INFO] [1733814784.140450447] [robot_state_publisher]: got segment gripper_left_link
[robot_state_publisher-2] [INFO] [1733814784.140455005] [robot_state_publisher]: got segment gripper_right_link
[robot_state_publisher-2] [INFO] [1733814784.140459339] [robot_state_publisher]: got segment link1
[robot_state_publisher-2] [INFO] [1733814784.140463495] [robot_state_publisher]: got segment link2
[robot_state_publisher-2] [INFO] [1733814784.140467530] [robot_state_publisher]: got segment link3
[robot_state_publisher-2] [INFO] [1733814784.140471673] [robot_state_publisher]: got segment link4
[robot_state_publisher-2] [INFO] [1733814784.140475662] [robot_state_publisher]: got segment link5
[robot_state_publisher-2] [INFO] [1733814784.140479440] [robot_state_publisher]: got segment world
[ros2_control_node-1] [WARN] [1733814784.150297704] [controller_manager]: [Deprecated] Passing the robot description parameter directly to the control_manager node is deprecated. Use '~/robot_description' topic from 'robot_state_publisher' instead.
[ros2_control_node-1] [INFO] [1733814784.150762238] [resource_manager]: Loading hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1733814784.163256190] [resource_manager]: Initialize hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] transmission_to_joint_matrix_
[ros2_control_node-1] [0][0] 1.000000, [0][1] 0.000000, [0][2] 0.000000, [0][3] 0.000000, [0][4] 0.000000,
[ros2_control_node-1] [1][0] 0.000000, [1][1] 1.000000, [1][2] 0.000000, [1][3] 0.000000, [1][4] 0.000000,
[ros2_control_node-1] [2][0] 0.000000, [2][1] 0.000000, [2][2] 1.000000, [2][3] 0.000000, [2][4] 0.000000,
[ros2_control_node-1] [3][0] 0.000000, [3][1] 0.000000, [3][2] 0.000000, [3][3] 1.000000, [3][4] 0.000000,
[ros2_control_node-1] [4][0] 0.000000, [4][1] 0.000000, [4][2] 0.000000, [4][3] 0.000000, [4][4] 1.000000,
[ros2_control_node-1] [5][0] 0.000000, [5][1] 0.000000, [5][2] 0.000000, [5][3] 0.000000, [5][4] 0.000000,
[ros2_control_node-1] joint_to_transmission_matrix_
[ros2_control_node-1] [0][0] 1.000000, [0][1] 0.000000, [0][2] 0.000000, [0][3] 0.000000, [0][4] 0.000000, [0][5] 0.000000,
[ros2_control_node-1] [1][0] 0.000000, [1][1] 1.000000, [1][2] 0.000000, [1][3] 0.000000, [1][4] 0.000000, [1][5] 0.000000,
[ros2_control_node-1] [2][0] 0.000000, [2][1] 0.000000, [2][2] 1.000000, [2][3] 0.000000, [2][4] 0.000000, [2][5] 0.000000,
[ros2_control_node-1] [3][0] 0.000000, [3][1] 0.000000, [3][2] 0.000000, [3][3] 1.000000, [3][4] 0.000000, [3][5] 0.000000,
[ros2_control_node-1] [4][0] 0.000000, [4][1] 0.000000, [4][2] 0.000000, [4][3] 0.000000, [4][4] 1.000000, [4][5] 0.000000,
[ros2_control_node-1] [INFO] [1733814784.164000125] [dynamixel_hardware_interface]: port_name /dev/ttyUSB0 / baudrate 1000000
[ros2_control_node-1] Dynamixel Information File List.
[ros2_control_node-1] num: 1000, name: xh430_w350.model
[ros2_control_node-1] num: 1020, name: xm430_w350.model
[ros2_control_node-1] num: 1060, name: xl430_w250.model
[ros2_control_node-1] num: 1080, name: xc430_w240.model
[ros2_control_node-1] num: 1100, name: xh540_w270.model
[ros2_control_node-1] num: 1160, name: 2xc430_w250.model
[ros2_control_node-1] num: 4000, name: ym070_210_m001.model
[ros2_control_node-1] num: 4020, name: ym070_210_r051.model
[ros2_control_node-1] num: 4030, name: ym070_210_r099.model
[ros2_control_node-1] num: 4050, name: ym070_210_a099.model
[ros2_control_node-1] num: 4120, name: ym080_230_m001.model
[ros2_control_node-1] num: 4140, name: ym080_230_r051.model
[ros2_control_node-1] num: 4150, name: ym080_230_r099.model
[ros2_control_node-1] num: 4170, name: ym080_230_a099.model
[ros2_control_node-1] num: 35074, name: rh_p12_rn.model
[ros2_control_node-1] [INFO] [1733814784.165060244] [dynamixel_hardware_interface]: $$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$$
[ros2_control_node-1] [INFO] [1733814784.165085781] [dynamixel_hardware_interface]: $$$$$ Init Dxl Comm Port
[ros2_control_node-1] [INFO] [1733814784.165119953] [dynamixel_hardware_interface]: Revolute to Prismatic gripper conversion enabled.
[ros2_control_node-1] Succeeded to open the port!
[ros2_control_node-1] Succeeded to change the [1000000] baudrate!
[ros2_control_node-1] [ID:011] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [ID:012] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [ID:013] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [ID:014] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [ID:015] Request ping - Ping succeeded. Dynamixel model number : 1020
[ros2_control_node-1] [INFO] [1733814784.172855510] [dynamixel_hardware_interface]: Trying to connect to the communication port...
[ros2_control_node-1] [INFO] [1733814784.172904554] [dynamixel_hardware_interface]: $$$$$ Init Dxl Items
[ros2_control_node-1] [INFO] [1733814784.174263837] [dynamixel_hardware_interface]: [ID:11] item_name:Drive Mode data:0
[ros2_control_node-1] [INFO] [1733814784.175202777] [dynamixel_hardware_interface]: [ID:11] item_name:Position D Gain data:100
[ros2_control_node-1] [INFO] [1733814784.176189566] [dynamixel_hardware_interface]: [ID:11] item_name:Position I Gain data:100
[ros2_control_node-1] [INFO] [1733814784.177218657] [dynamixel_hardware_interface]: [ID:11] item_name:Position P Gain data:800
[ros2_control_node-1] [INFO] [1733814784.178201814] [dynamixel_hardware_interface]: [ID:12] item_name:Drive Mode data:0
[ros2_control_node-1] [INFO] [1733814784.179188157] [dynamixel_hardware_interface]: [ID:12] item_name:Position D Gain data:100
[ros2_control_node-1] [INFO] [1733814784.180215312] [dynamixel_hardware_interface]: [ID:12] item_name:Position I Gain data:100
[ros2_control_node-1] [INFO] [1733814784.181209639] [dynamixel_hardware_interface]: [ID:12] item_name:Position P Gain data:800
[ros2_control_node-1] [INFO] [1733814784.182195348] [dynamixel_hardware_interface]: [ID:13] item_name:Drive Mode data:0
[ros2_control_node-1] [INFO] [1733814784.183204690] [dynamixel_hardware_interface]: [ID:13] item_name:Position D Gain data:100
[ros2_control_node-1] [INFO] [1733814784.184192489] [dynamixel_hardware_interface]: [ID:13] item_name:Position I Gain data:100
[ros2_control_node-1] [INFO] [1733814784.185186500] [dynamixel_hardware_interface]: [ID:13] item_name:Position P Gain data:800
[ros2_control_node-1] [INFO] [1733814784.186251591] [dynamixel_hardware_interface]: [ID:14] item_name:Drive Mode data:0
[ros2_control_node-1] [INFO] [1733814784.187186969] [dynamixel_hardware_interface]: [ID:14] item_name:Position D Gain data:100
[ros2_control_node-1] [INFO] [1733814784.188187523] [dynamixel_hardware_interface]: [ID:14] item_name:Position I Gain data:100
[ros2_control_node-1] [INFO] [1733814784.189248186] [dynamixel_hardware_interface]: [ID:14] item_name:Position P Gain data:800
[ros2_control_node-1] [INFO] [1733814784.189281693] [dynamixel_hardware_interface]: $$$$$ Init Dxl Read Items
[ros2_control_node-1] Dynamixel Read Type : sync read
[ros2_control_node-1] ID : 11, 12, 13, 14, 15,
[ros2_control_node-1] Read items : Present Position Present VelocityPresent Current Torque Enable Present Input Voltage
[ros2_control_node-1] set sync read (indirect addr) : addr 224, size 13
[ros2_control_node-1] Success to set SyncRead handler using indirect address
[ros2_control_node-1] [INFO] [1733814784.255333410] [dynamixel_hardware_interface]: $$$$$ Init Dxl Write Items
[ros2_control_node-1] Dynamixel Write Type : sync write
[ros2_control_node-1] ID : 11, 12, 13, 14, 15,
[ros2_control_node-1] Write items : Goal Position
[ros2_control_node-1] set sync write (indirect addr) : addr 634, size 4
[ros2_control_node-1] Success to set SyncWrite handler using indirect address
[ros2_control_node-1] [INFO] [1733814784.285087764] [resource_manager]: Successful initialization of hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1733814784.285623329] [resource_manager]: 'configure' hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1733814784.285649762] [resource_manager]: Successful 'configure' of hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1733814784.285677277] [resource_manager]: 'activate' hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1733814784.288399302] [dynamixel_hardware_interface]: Sync joint state to command (position, 3.25354 <- position, 3.25354
[ros2_control_node-1] [INFO] [1733814784.288484144] [dynamixel_hardware_interface]: Sync joint state to command (position, -22.5879 <- position, -22.5879
[ros2_control_node-1] [INFO] [1733814784.288522542] [dynamixel_hardware_interface]: Sync joint state to command (position, 48.5393 <- position, 48.5393
[ros2_control_node-1] [INFO] [1733814784.288556311] [dynamixel_hardware_interface]: Sync joint state to command (position, 59.4431 <- position, 59.4431
[ros2_control_node-1] [INFO] [1733814784.288587808] [dynamixel_hardware_interface]: Sync joint state to command (position, 1.08561 <- position, 1.08561
[ros2_control_node-1] [INFO] [1733814784.288619773] [dynamixel_hardware_interface]: Sync joint state to command (position, 0 <- position, 0
[spawner-3] [INFO] [1733814784.344387122] [spawner_joint_state_broadcaster]: waiting for service /controller_manager/list_controllers to become available...
[ros2_control_node-1] [ID:011] Torque ON
[ros2_control_node-1] [ID:012] Torque ON
[ros2_control_node-1] [ID:013] Torque ON
[ros2_control_node-1] [ID:014] Torque ON
[ros2_control_node-1] [ID:015] Torque ON
[ros2_control_node-1] [INFO] [1733814784.794363518] [dynamixel_hardware_interface]: Dynamixel Hardware Start!
[ros2_control_node-1] [INFO] [1733814784.794583503] [resource_manager]: Successful 'activate' of hardware 'OpenManipulatorXSystem'
[ros2_control_node-1] [INFO] [1733814784.844187956] [controller_manager]: update rate is 1000 Hz
[ros2_control_node-1] [INFO] [1733814784.844239126] [controller_manager]: Spawning controller_manager RT thread with scheduler priority: 50
[ros2_control_node-1] [WARN] [1733814784.847602761] [controller_manager]: No real-time kernel detected on this system. See [https://control.ros.org/master/doc/ros2_control/controller_manager/doc/userdoc.html] for details on how to enable realtime scheduling.
[ros2_control_node-1] [INFO] [1733814784.864748196] [controller_manager]: Loading controller 'joint_state_broadcaster'
[spawner-3] [INFO] [1733814784.872066996] [spawner_joint_state_broadcaster]: Loaded joint_state_broadcaster
[ros2_control_node-1] [INFO] [1733814784.872576377] [controller_manager]: Configuring controller 'joint_state_broadcaster'
[ros2_control_node-1] [INFO] [1733814784.872671446] [joint_state_broadcaster]: 'joints' or 'interfaces' parameter is empty. All available state interfaces will be published
[spawner-3] [INFO] [1733814784.890559256] [spawner_joint_state_broadcaster]: Configured and activated joint_state_broadcaster
[INFO] [spawner-3]: process has finished cleanly [pid 3070]
[INFO] [spawner-4]: process started with pid [3114]
[INFO] [spawner-5]: process started with pid [3116]
[ros2_control_node-1] [INFO] [1733814785.561511632] [controller_manager]: Loading controller 'arm_controller'
[ros2_control_node-1] [WARN] [1733814785.574916138] [arm_controller]: [Deprecated]: "allow_nonzero_velocity_at_trajectory_end" is set to true. The default behavior will change to false.
[ros2_control_node-1] [INFO] [1733814785.576633589] [controller_manager]: Loading controller 'gripper_controller'
[spawner-5] [INFO] [1733814785.598697696] [spawner_arm_controller]: Loaded arm_controller
[ros2_control_node-1] [INFO] [1733814785.599380288] [controller_manager]: Configuring controller 'arm_controller'
[ros2_control_node-1] [INFO] [1733814785.599545696] [arm_controller]: No specific joint names are used for command interfaces. Using 'joints' parameter.
[ros2_control_node-1] [INFO] [1733814785.599572347] [arm_controller]: Command interfaces are [position] and state interfaces are [position velocity].
[ros2_control_node-1] [INFO] [1733814785.599598355] [arm_controller]: Using 'splines' interpolation method.
[spawner-4] [INFO] [1733814785.600233495] [spawner_gripper_controller]: Loaded gripper_controller
[ros2_control_node-1] [INFO] [1733814785.600325312] [arm_controller]: Controller state will be published at 200.00 Hz.
[ros2_control_node-1] [INFO] [1733814785.605748626] [arm_controller]: Action status changes will be monitored at 20.00 Hz.
[ros2_control_node-1] [INFO] [1733814785.609463352] [controller_manager]: Configuring controller 'gripper_controller'
[ros2_control_node-1] [INFO] [1733814785.609542143] [gripper_controller]: Action status changes will be monitored at 20Hz.
[spawner-5] [INFO] [1733814785.619695267] [spawner_arm_controller]: Configured and activated arm_controller
[spawner-4] [INFO] [1733814785.626031382] [spawner_gripper_controller]: Configured and activated gripper_controller
[INFO] [spawner-4]: process has finished cleanly [pid 3114]
[INFO] [spawner-5]: process has finished cleanly [pid 3116]
TIP:
- If you can’t load DYNAMIXEL, please check firmware to use ROBOTIS software (DYNAMIXEL Wizard 2.0)
NOTE: OpenMANIPULATOR-X controller is compatible with Protocol 2.0 which supports MX 2.0, X and Pro series. Protocol 1.0 does not support SyncRead instructions to access to multiple DYNAMIXEL’s’s simultaneously.
Open a new terminal and launch the open_manipulator_controller package.
- When operating with
U2D2$ roslaunch open_manipulator_controller open_manipulator_controller.launch - When operating with
OpenCR$ roslaunch open_manipulator_controller open_manipulator_controller.launch usb_port:=/dev/ttyACM0 baud_rate:=1000000
The open_manipulator_controller.launch file has several arguments for launching the controller package. Please see below Parameter Descriptions.
WARNING :
Please check each joint position before running OpenMANIPULATOR-X. The manipulator will not operate if any joint is out of operable range.
The following image describes the recommended pose of OpenMANIPULATOR-X at start up. Please adjust the pose before the torque is turned on by the controller.
Follwing message will be shown in the terminal with a successful launch of the controller.
SUMMARY
========
PARAMETERS
* /open_manipulator_controller/control_period: 0.01
* /open_manipulator_controller/using_platform: True
* /rosdistro: noetic
* /rosversion: 1.15.9
NODES
/
open_manipulator_controller (open_manipulator_controller/open_manipulator_controller)
auto-starting new master
process[master]: started with pid [5454]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to da579122-f0fa-11eb-9d7a-0790f3842b2b
process[rosout-1]: started with pid [5464]
started core service [/rosout]
process[open_manipulator_controller-2]: started with pid [5467]
port_name and baud_rate are set to /dev/ttyUSB0, 1000000
Joint Dynamixel ID : 11, Model Name : XM430-W350
Joint Dynamixel ID : 12, Model Name : XM430-W350
Joint Dynamixel ID : 13, Model Name : XM430-W350
Joint Dynamixel ID : 14, Model Name : XM430-W350
Gripper Dynamixel ID : 15, Model Name :XM430-W350
[INFO] Succeeded to init /open_manipulator_controller
TIP:
- If you can’t load DYNAMIXEL, please check your DYNAMIXEL settings using the following command from DYNAMIXEL Workbench packages.
- U2D2 :
$ rosrun dynamixel_workbench_controllers find_dynamixel /dev/ttyUSB0 - OpenCR :
$ rosrun dynamixel_workbench_controllers find_dynamixel /dev/ttyACM0
- U2D2 :
- For easy maintanence and configuration of DYNAMIXEL, it is recommended to use DYNAMIXEL Wizard 2.0 or R+ Manager 2.0
- If you would like to use different DYNAMIXEL ID for OpenMANIPULATOR-X, please modify
open_manipulator.cppin the open_manipulator_lib directory. The default ID is 11, 12, 13, 14 for joints and 15 for the gripper
NOTE:
OpenMANIPULATOR-X controller is compatible with Protocol 2.0.
Protocol 1.0 does not support SyncRead instructions to access multiple DYNAMIXEL simultaneously.
Protocol 2.0 is supported in MX (2.0), X, P, and Pro series only.
Parameter Descriptions
usb_port: Specifies a USB port. The actual port number assigned to the device may vary by system, but usually the number begins with 0 if there isn’t other device.$ ls /dev/tty*command lists up the ports.- Port for U2D2: /dev/ttyUSB0
- Port for OpenCR: /dev/ttyACM0
-
baud_rate: Specifies baud rate of DYNAMIXEL. The default baud rate of OpenMANIPULATOR-X is 1000000. -
control_period: Specifies a communication period (control loop time) between DYNAMIXEL and PC. use_platform: Condition to run the Simulation.- Set true when operating the actual OpenMANIPULATOR.
- Set false when running a virtual OpenMANIPULATOR in Gazebo (3D robotics simulator).
- Arduino sketch for OpenCR OpenMANIPULATOR-X includes the controller in the code.
- Connecting the OpenMANIPULATOR-X and 12V power source, and turning on the power switch of the OpenCR 1.0 will automatically launch the controller.
- Please refer to the Launch Controller in the Basic Operation section.