
Message List
NOTE:
If you want to learn more, please refer to the official documentation for MoveIt 2 and ros2_control:
MoveIt 2 Documentation
ros2_control Documentation
NOTE:
If you want to learn more, please refer to the official documentation for MoveIt 2 and ros2_control:
MoveIt 2 Documentation
ros2_control Documentation
NOTE:
Please launch the OpenMANIPULATOR-X Controller before running this section.
The controller uses topic and service to control and check the status of OpenMANIPULATOR-X.
Topic
Not supported
Not supported
Topic Monitor
In order to check the topics of OpenMANIPULATOR-X controller, you can use rqt GUI tool. Rqt is a Qt-based framework for GUI development in ROS environment. Rqt allows users to easily read topics. Various information such as topic name, type, bandwidth, Hz and value are shown on the Topic monitor plugin of rqt.
$ rqt
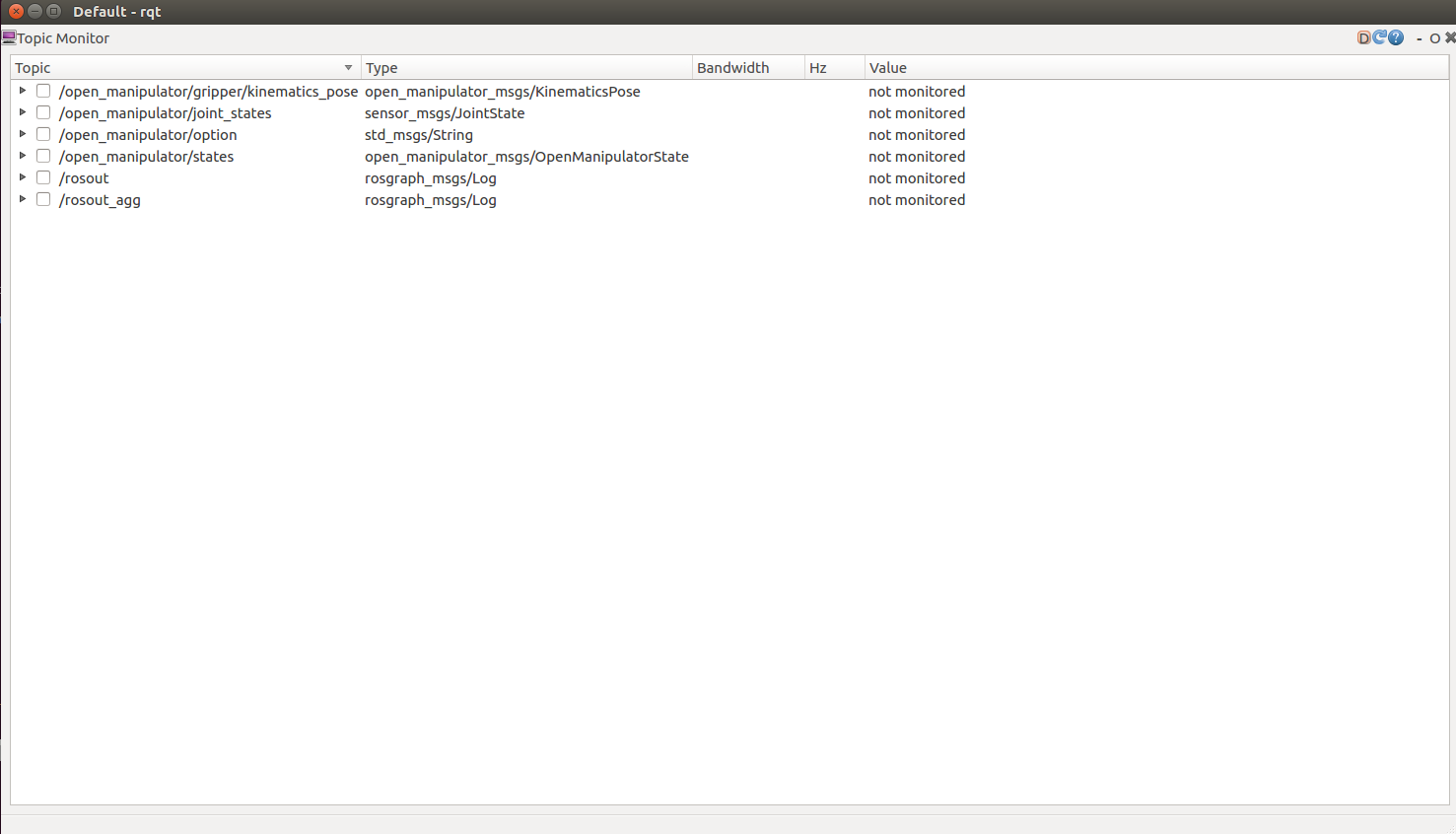
TIP: If the Topic Monitor is not shown, select the plugin > Topics > Topic Monitor.
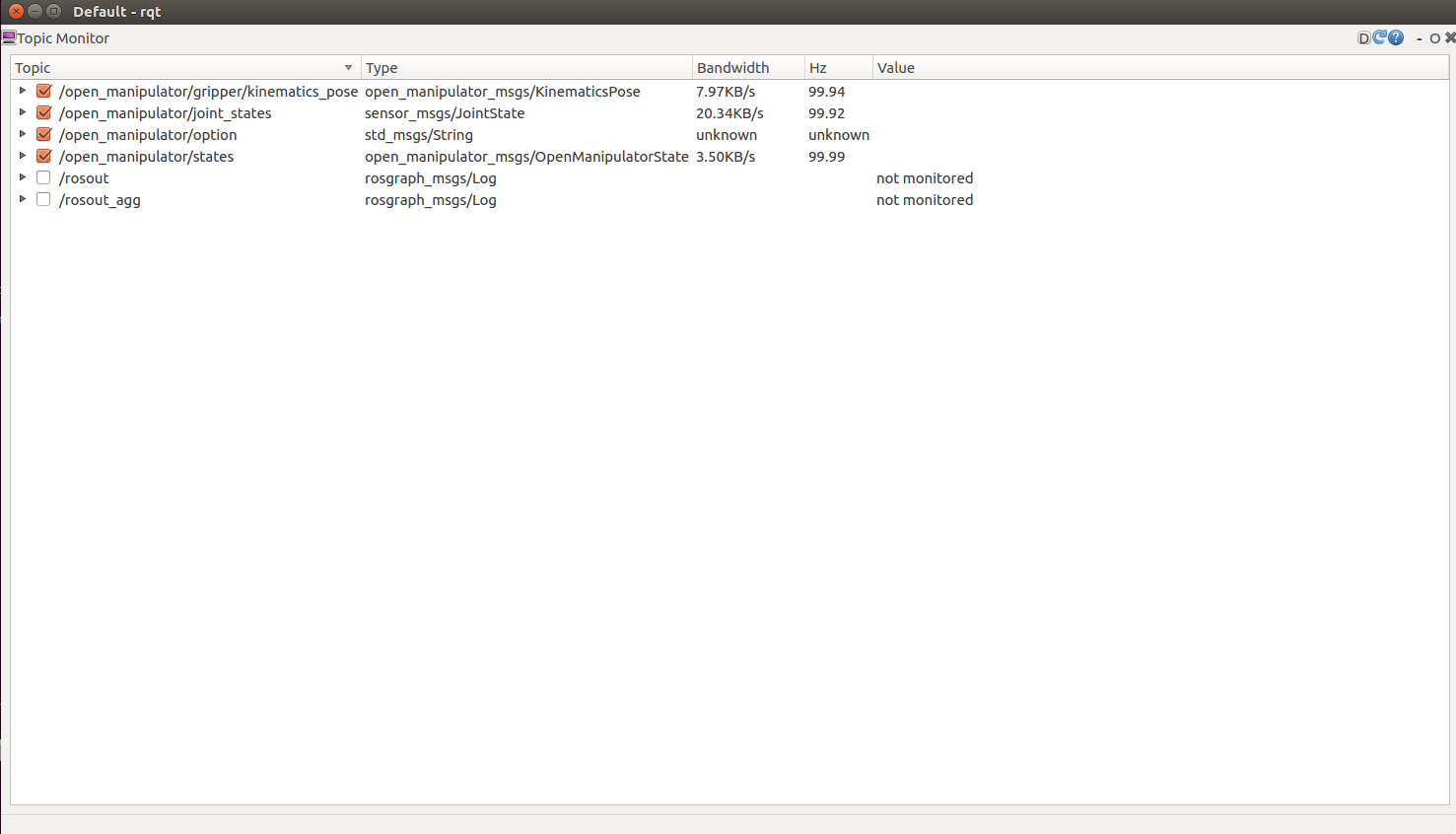
Unchecked Topics will not be monitored. To monitor topics, select the checkbox.
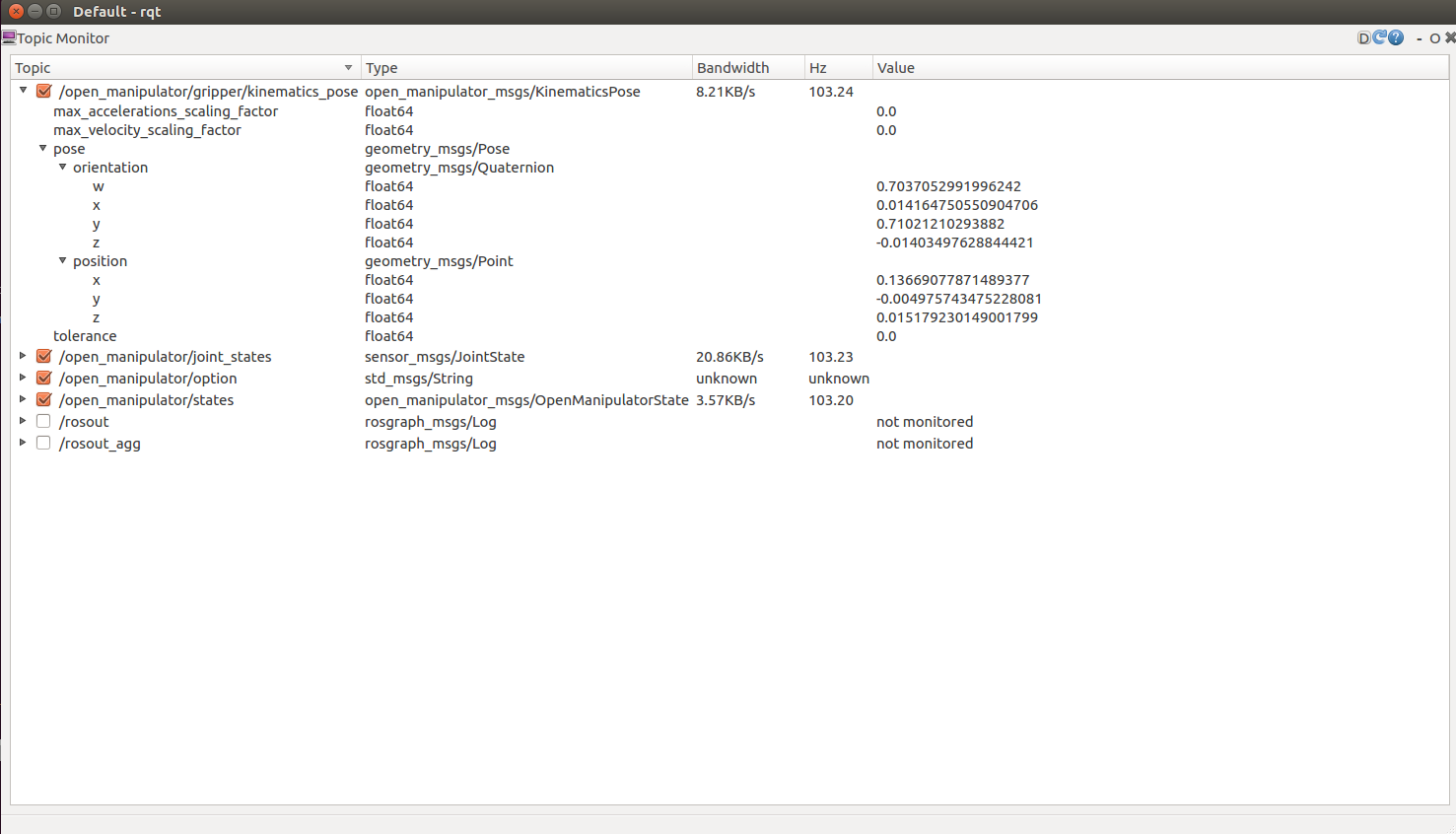
If you would like to see more details about a specific topic, click on the ▶ icon next to the checkbox to expand.
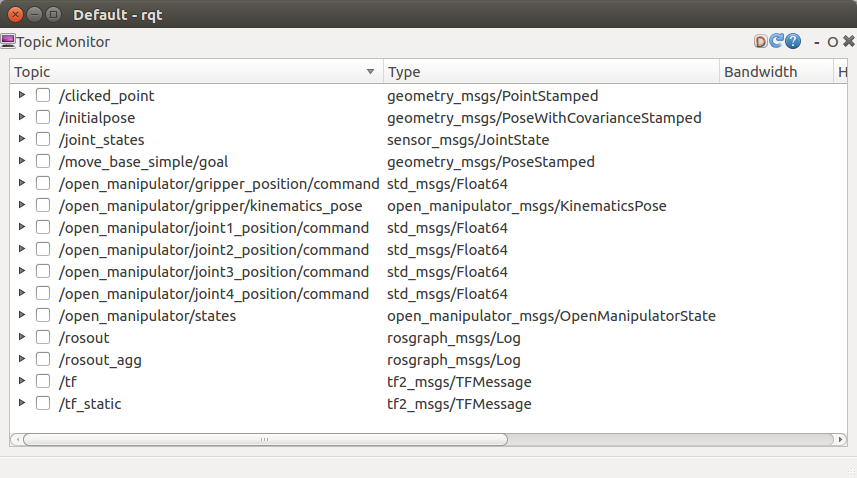
Published Topic List
A list of topics that the open_manipulator_controller publishes.
/states
- open_manipulator_msgs/OpenManipulatorState
- The message indicating the status of OpenMANIPULATOR.
- “open_manipulator_actuator_state” indicates whether actuators are enabled
ACTUATOR_ENABLEor disabledACTUATOR_DISABLE. - “open_manipulator_moving_state” indicates whether OpenMANIPULATOR-X is moving along the trajectory
IS_MOVINGor stoppedSTOPPED.
/joint_states
- sensor_msgs/JointState
- The message indicating the states of joints of OpenMANIPULATOR-X.
- “name” indicates joint component names.
- “effort” shows current consumption of each DYNAMIXEL.
- “position” and “velocity” indicates angles and angular velocities of joints.
/gripper/kinematics_pose
- open_manipulator_msgs/KinematicsPose
- The message that indicates a pose (position and orientation) in task space.
- “Position” indicates the x, y and z values of the center of the end-effector (tool).
- “Orientation” indicates the rotation of the end-effector (tool) in quaternion.
NOTE: These topics are messages for checking the status of the robot regardless of the robot’s motion.
Subscribed Topic List
A list of topics that the open_manipulator_controller subscribes.
/option
- std_msgs/String
- This topic is used when setting the OpenMANIPULATOR-X options.
- “print_open_manipulator_setting” requests the open_manipulator_controller to display “Manipulator Description”.
/joint_states
- sensor_msgs/JointState
- The message indicating the states of joints of OpenMANIPULATOR-X.
- “name” indicates joint component names.
- “effort” shows current consumption of each DYNAMIXEL.
- “position” and “velocity” indicates angles and angular velocities of joints.
/gripper/kinematics_pose
- open_manipulator_msgs/KinematicsPose
- The message that indicates a pose (position and orientation) in task space.
- “Position” indicates the x, y and z values of the center of the end-effector (tool).
- “Orientation” indicates the rotation of the end-effector (tool) in quaternion.
NOTE: These topics are messages for checking the status of the robot regardless of the robot’s motion.
Not supported
Service
Not supported
Not supported
Service Server List
NOTE: These services are messages to operate OpenMANIPULATOR-X or to change the status of DYNAMIXEL of OpenMANIPULATOR.
A list of service servers that open_manipulator_controller has.
/goal_joint_space_path
- open_manipulator_msgs/SetJointPosition
- The user can use this service to create a trajectory in the joint space.
- The user inputs the angle of the target joint and the total time of the trajectory.
/goal_joint_space_path_to_kinematics_pose
- open_manipulator_msgs/SetKinematicsPose
- The user can use this service to create a trajectory in the joint space.
- The user inputs the kinematics pose of the OpenMANIPULATOR-X end-effector(tool) in the task space and the total time of the trajectory.
/goal_joint_space_path_to_kinematics_position
- open_manipulator_msgs/SetKinematicsPose
- The user can use this service to create a trajectory in the joint space.
- The user inputs the kinematics pose(position only) of the OpenMANIPULATOR-X end-effector(tool) in the task space and the total time of the trajectory.
/goal_joint_space_path_to_kinematics_orientation
- open_manipulator_msgs/SetKinematicsPose
- The user can use this service to create a trajectory in the joint space.
- The user inputs the kinematics pose(orientation only) of the OpenMANIPULATOR-X end-effector(tool) in the task space and the total time of the trajectory.
/goal_task_space_path
- open_manipulator_msgs/SetKinematicsPose
- The user can use this service to create a trajectory in the task space.
- The user inputs the kinematics pose of the OpenMANIPULATOR-X end-effector(tool) in the task space and the total time of the trajectory.
/goal_task_space_path_position_only
- open_manipulator_msgs/SetKinematicsPose
- The user can use this service to create a trajectory in the task space.
- The user inputs the kinematics pose(position only) of the OpenMANIPULATOR-X end-effector(tool) in the task space and the total time of the trajectory.
/goal_task_space_path_orientation_only
- open_manipulator_msgs/SetKinematicsPose
- The user can use this service to create a trajectory in the task space.
- The user inputs the kinematics pose(orientation only) of the OpenMANIPULATOR-X end-effector(tool) in the task space and the total time of the trajectory.
/goal_joint_space_path_from_present
- open_manipulator_msgs/SetJointPosition
- The user can use this service to create a trajectory from present joint angle in the joint space.
- The user inputs the angle of the target joint to be changed and the total time of the trajectory.
/goal_task_space_path_from_present
- open_manipulator_msgs/SetKinematicsPose
- The user can use this service to create a trajectory from present kinematics pose in the task space.
- The user inputs the kinematics pose to be changed of the OpenMANIPULATOR-X end-effector(tool) in the task space and the total time of the trajectory.
/goal_task_space_path_from_present_position_only
- open_manipulator_msgs/SetKinematicsPose
- The user can use this service to create a trajectory from present kinematics pose in the task space.
- The user inputs the kinematics pose(position only) of the OpenMANIPULATOR-X end-effector(tool) in the task space and the total time of the trajectory.
/goal_task_space_path_from_present_orientation_only
- open_manipulator_msgs/SetKinematicsPose
- The user can use this service to create a trajectory from present kinematics pose in the task space.
- The user inputs the kinematics pose(orientation only) of the OpenMANIPULATOR-X end-effector(tool) in the task space and the total time of the trajectory.
/goal_tool_control
- open_manipulator_msgs/SetJointPosition
- The user can use this service to move the tool of OpenMANIPULATOR.
/set_actuator_state
- open_manipulator_msgs/SetActuatorState
- The user can use this service to control the state of actucators.
- If the user set true at set_actuator_state valuable, the actuator will be enabled.
- If the user set false at set_actuator_state valuable, the actuator will be disabled.
/goal_drawing_trajectory
- open_manipulator_msgs/SetDrawingTrajectory
- The user can use this service to create a drawing trajectory.
- The user can create the circle, the rhombus, the heart, and the straight line trajectory.
Not supported