
NOTE: The DYNAMIXEL Workbench e-Manual in Japanese (日本語) is available for the Japanese.
Introduction
![]()
The purpose of DYNAMIXEL Workbench is to use more simple and easy to use any DYNAMIXEL. This library is based on DYNAMIXEL SDK and supports ROS, Linux, macOS and Arduino. However, this library is not magic stick to operate DYNAMIXEL with any setup. It has some restriction compared with DYNAMIXEL SDK but we are continue to upgrade this library for almost everyone loves DYNAMIXEL.
If have any questions or issues, please get a ticket in github issue.
CAUTION : DYNAMIXEL Workbench is designed to control DYNAMIXEL in ROS with limited features. For setting up and testing the DYNAMIXEL, please use DYNAMIXEL Wizard 2.0 or DYNAMIXEL SDK.
Supported DYNAMIXEL
| DYNAMIXEL Series | |||||
|---|---|---|---|---|---|
| AX | AX-12W | AX-12+/12A | AX-18F/18A | ||
| EX | EX-106+ | ||||
| RX | RX-10 | RX-24F | RX-28 | RX-64 | |
| MX | MX-12W | MX-28, MX-28(2.0) | MX-64, MX-64(2.0) | MX-106, MX-106(2.0) | |
| XL | XL320 | XL430-W250 | 2XL430-W250 | ||
| XC | XC430-W150 [XC430-T150BB] |
XC430-W240 [XC430-T240BB] |
|||
| XM | XM430-W210 | XM430-W350 | XM540-W150 | XM540-W270 | |
| XH | XH430-W210 XH430-W350 |
XH430-V210 XH430-V350 |
XH540-W150 XH540-W270 |
XH540-V150 XH540-V270 |
|
| PRO L | L42-10-S300-R | L54-30-S500-R | L54-30-S400-R | L54-50-S500-R | L54-50-S290-R |
| PRO M | M42-10-S260-R | M54-40-S250-R | M54-60-S250-R | ||
| PRO H | H42-20-S300-R | H54-100-S500-R | H54-200-S500-R | ||
| PRO M(A) | M42-10-S260-R(A) | M54-40-S250-R(A) | M54-60-S250-R(A) | ||
| PRO H(A) | H42-20-S300-R(A) | H54-100-S500-R(A) | H54-200-S500-R(A) | ||
| PM | PM54-060-S250-R | PM54-040-S250-R | PM42-010-S260-R | ||
| PH | PH42-020-S300-R | PH54-100-S500-R | PH54-200-S500-R |
DYNAMIXEL Workbench metapackage contains 3 packages: Controllers, Operators, and Toolbox. The Controllers package introduces how to employ DYNAMIXEL on different operating mode with DYNAMIXEL Workbench library(Toolbox). In addition, the Operators demonstrates some straightforward examples by operating Controllers.
Downloads
ROS
Install ROS on PC
![]()
The following script will allow you to simplify the ROS installation procedure. Run the following command in a terminal window. The terminal application can be found with the Ubuntu search icon on the top left corner of the screen, or you can use shortcut key for terminal is Ctrl+Alt+T. After install ROS, please reboot PC.
$ sudo apt-get update
$ sudo apt-get upgrade
$ wget https://raw.githubusercontent.com/ROBOTIS-GIT/robotis_tools/master/install_ros_kinetic.sh && chmod 755 ./install_ros_kinetic.sh && bash ./install_ros_kinetic.sh
NOTE: In order to check which packages are installed, please check this link out. install_ros_kinetic.sh
If you prefer manual installation, please following the link below.
Downloads ROS Packages
Main packages
$ git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench.git
$ git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench-msgs.git
Dependent packages
$ git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git
OpenCR and OpenCM
Downloads Arduino IDE
- Downloads Arduino IDE for uploding firmware to OpenCR and OpenCM
OpenCR Arduino IDE
In order to use Exameples for OpenCM 9.04 in Arduino, Porting OpenCM9.04 Board to Arduino IDE is required.
OpenCM Arduino IDE
In order to use Exameples for OpenCM 9.04 in Arduino, Porting OpenCM9.04 Board to Arduino IDE is required.
Linux and macOS
NOTE: We don’t have a plan to release for Windows OS. But we will happily merge any contributions regarding Windows environment.
Downloads Library
$ git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git
$ git clone https://github.com/ROBOTIS-GIT/dynamixel-workbench.git
Setup DYNAMIXEL SDK library
Setup DYNAMIXEL Workbench library
$ cd ~/dynamixel-workbench/dynamixel_workbench_toolbox/examples
$ mkdir -p build && cd build
$ cmake ..
$ make
Device Setup
WARNING: You should check the device setup over and over again before you use the library.
Please check power input and usb port once again.
U2D2
How to Setup
Copy rules file
$ wget https://raw.githubusercontent.com/ROBOTIS-GIT/dynamixel-workbench/master/99-dynamixel-workbench-cdc.rules
$ sudo cp ./99-dynamixel-workbench-cdc.rules /etc/udev/rules.d/
$ sudo udevadm control --reload-rules
$ sudo udevadm trigger
Check usb port
$ ls /dev/tty*
Then you can find /dev/ttyUSB0 (The number of port may be different depending on setup)
NOTE:
- Please run roscore before rosrun, because rosrun can’t operate without roscore. The rosrun and roscore should be running in separate terminal windows.
- This run file configures the usb latency timer to 1 ms. If you want to check this setting, run the following command in a terminal window.
cat /sys/bus/usb-serial/devices/ttyUSB0/latency_timer
OpenCR
Connect power(12v) and TTL or RS485
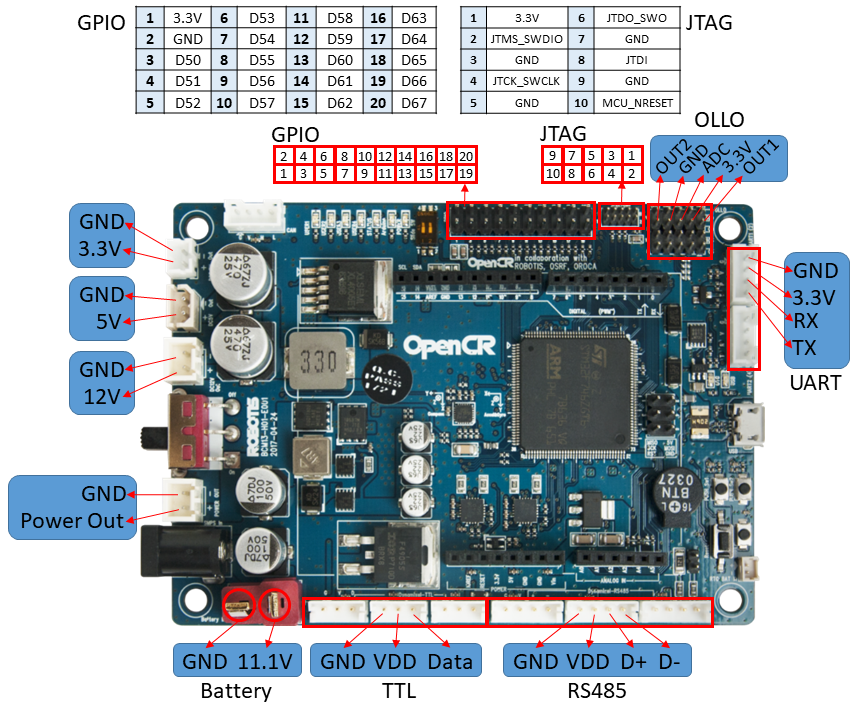
TIP:
If you want to use OpenCR as U2D2, please upload usb_to_dxl firmware (File -> Examples -> OpenCR -> 10.Etc -> usb_to_dxl)
Then you can use /dev/ttyACM0 port (The number of port may be different depending on setup).
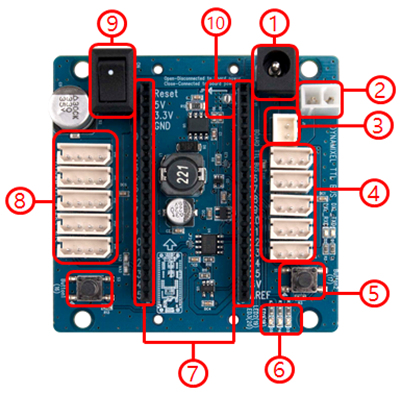
OpenCM
Connect power(12v) and TTL(4 pin)or RS485(8 pin)
TIP: Please follow a link for getting more information about pin
Tutorials
ROS Tutorials
Find Dynamixels
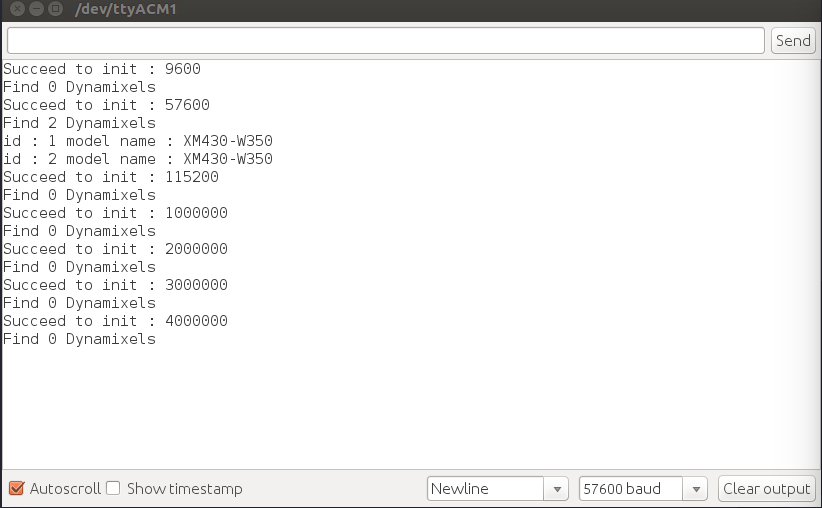
This node scans all ID with each Baudrate(9600, 57600, 115200, 1000000, 2000000, 3000000, 4000000) and shows how many dynamixels are connected.
Run find_dynamixel
$ rosrun dynamixel_workbench_controllers find_dynamixel /dev/ttyUSB0
Then you can see below texts.
[ INFO] [1544589715.841211668]: Succeed to init(9600)
[ INFO] [1544589715.841236741]: Wait for scanning...
[ INFO] [1544589737.539083688]: Find 0 Dynamixels
[ INFO] [1544589737.539526809]: Succeed to init(57600)
[ INFO] [1544589737.539570059]: Wait for scanning...
[ INFO] [1544589755.441019922]: Find 2 Dynamixels
[ INFO] [1544589755.441086482]: id : 1, model name : XM430-W350
[ INFO] [1544589755.441109032]: id : 2, model name : XM430-W350
[ INFO] [1544589755.441504892]: Succeed to init(115200)
[ INFO] [1544589755.441548969]: Wait for scanning...
[ INFO] [1544589773.031677244]: Find 0 Dynamixels
[ INFO] [1544589773.032153380]: Succeed to init(1000000)
[ INFO] [1544589773.032178580]: Wait for scanning...
[ INFO] [1544589790.291943770]: Find 0 Dynamixels
[ INFO] [1544589790.292404604]: Succeed to init(2000000)
[ INFO] [1544589790.292418207]: Wait for scanning...
[ INFO] [1544589807.530702991]: Find 0 Dynamixels
[ INFO] [1544589807.531286252]: Succeed to init(3000000)
[ INFO] [1544589807.531331656]: Wait for scanning...
[ INFO] [1544589824.762803705]: Find 0 Dynamixels
[ INFO] [1544589824.763461821]: Succeed to init(4000000)
[ INFO] [1544589824.763506935]: Wait for scanning...
[ INFO] [1544589841.990120553]: Find 0 Dynamixels
TIP: If you can’t find any DYNAMIXEL, please check usb port, power. Even if it can’t find anything, please check firmware to use ROBOTIS software (R+ Manager 2.0 or R+ Manager 1.0)
Controllers
This package is to control DYNAMIXEL by ROS API. You can load your DYNAMIXEL by simply creating yaml file.
The configuration of the yaml file is as follows. name is used for joint name of /joint_states topic as well as identifing DYNAMIXEL.
When controller is initialized, DYNAMIXEL information is loaded from the file and configures each Control_Table_Item with the value for each DYNAMIXEL based on id.
[name]:
ID: [id]
[Control_Table_Item]: [value]
[Control_Table_Item]: [value]
.
.
.
[name]:
ID: [id]
[Control_Table_Item]: [value]
[Control_Table_Item]: [value]
[Control_Table_Item]: [value]
.
.
.
Let’s take a look at the joint_2_0.yaml file. This file indicates configuration for 2 DYNAMIXEL. The first DYNAMIXEL has the name of ‘pan’ and id is ‘1’ whereas the second DYNAMIXEL has the name of ‘tilt’ and id is ‘2’. Both DYNAMIXEL will be set Return_Delay_time to zero(0) and Operating_Mode to Position Control Mode(3).
pan:
ID: 1
Return_Delay_Time: 0
Operating_Mode: 3
Profile_Acceleration: 0
Profile_Velocity: 0
tilt:
ID: 2
Return_Delay_Time: 0
Operating_Mode: 3
Profile_Acceleration: 0
Profile_Velocity: 0
WARNING: Be sure to keep the following for right use of the package.
-Torque Enable, which is the data of Control Table of DYNAMIXEL, is not supposed to be set by users, but it’s enabled by itself during initialization.
- Control Table item has to follow Camel_Case without a blank.
- Be sure to set DYNAMIXEL ID before use of this package. Use
- 2XL430-W250 does not support this package (Controllers). By using this package with 2XL430-W250, one of Torque Enable (64) of a detected ID from two axles of 2XL430-W250 is automatically set as ‘1’ (Torque on).
In this case, EEPROM of the other axle is deactivated, and the package can not access to the EEPROM field, which cause a connection error when you use the package.
Let’s take a look at the dynamixel_controller.launch file
<launch>
<arg name="usb_port" default="/dev/ttyUSB0"/>
<arg name="dxl_baud_rate" default="57600"/>
<arg name="namespace" default="dynamixel_workbench"/>
<arg name="use_moveit" default="false"/>
<arg name="use_joint_state" default="true"/>
<arg name="use_cmd_vel" default="false"/>
<param name="dynamixel_info" value="$(find dynamixel_workbench_controllers)/config/basic.yaml"/>
<node name="$(arg namespace)" pkg="dynamixel_workbench_controllers" type="dynamixel_workbench_controllers"
required="true" output="screen" args="$(arg usb_port) $(arg dxl_baud_rate)">
<param name="use_moveit" value="$(arg use_moveit)"/>
<param name="use_joint_states_topic" value="$(arg use_joint_state)"/>
<param name="use_cmd_vel_topic" value="$(arg use_cmd_vel)"/>
<rosparam>
publish_period: 0.010
dxl_read_period: 0.010
dxl_write_period: 0.010
mobile_robot_config: <!--this values will be set when 'use_cmd_vel' is true-->
seperation_between_wheels: 0.160 <!--default value is set by reference of TB3-->
radius_of_wheel: 0.033 <!--default value is set by reference of TB3-->
</rosparam>
</node>
</launch>
Launch dynamixel_controller
$ cd ~/catkin_ws && catkin_make
$ roslaunch dynamixel_workbench_controllers dynamixel_controllers.launch
If controller load your DYNAMIXEL, you can watch below texts
[ INFO] [1544595828.276238724]: Name : pan, ID : 1, Model Number : 1020
[ INFO] [1544595828.316198852]: Name : tilt, ID : 2, Model Number : 1020
After initialization, DYNAMIXEL will be torque on. If you want to write value to DYNAMIXEL, you can use ROS service(/dynamixel_command).
Open rqt and Plugins -> Services -> Service Caller
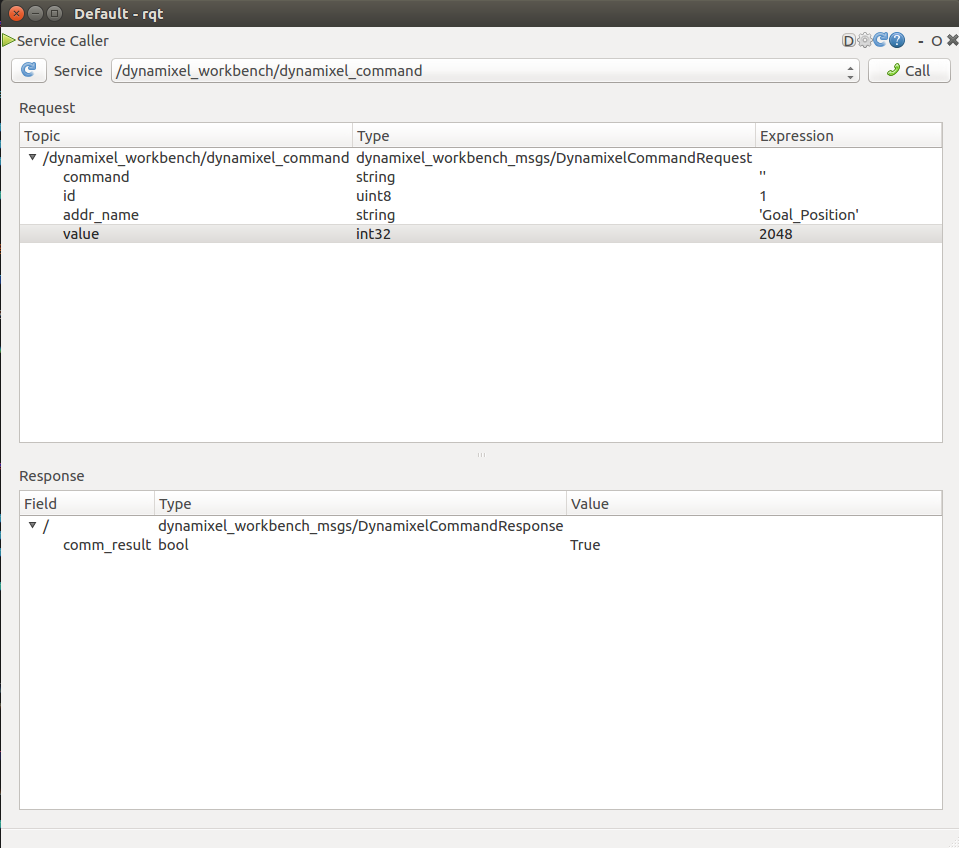
Or use command line
$ rosservice call /dynamixel_workbench/dynamixel_command "command: ''
id: 1
addr_name: 'Goal_Position'
value: 2048"
Parameters List :
-
usb_port
USB port name you used -
dxl_baud_rate
Baud Rate of DYNAMIXEL -
namespace
Namespace of this package -
dynamixel_info
YAML file path -
publish_period
Period of publishing topic (msec) -
dxl_read_period
Period of reading information of DYNAMIXEL (msec) -
dxl_write_period
Period of writing value to DYNAMIXEL (msec) -
use_moveit
If you use joint trajectory from calculated by MoveIt!, please set True -
use_joint_states_topic
If you want publish /joint_states, please set True -
use_cmd_vel_topic
If you want subscribe /cmd_vel, please set True -
seperation_between_wheels
This parameters is valid whenuse_cmd_vel_topicit True -
radius_of_wheel
This parameters is valid whenuse_cmd_vel_topicit True
Topic List :
-
/dynamixel_state(dynamixel_workbench_msgs/DynamixelStateList)
Provides states of connected DYNAMIXEL -
/joint_states(sensor_msgs/JointState)
Provides joint information about connected DYNAMIXEL -
/joint_trajectory(trajectory_msgs/JointTrajectory)
Receives joint trajectory to control DYNAMIXEL
Service List :
/dynamixel_command(dynamixel_workbench_msgs/DynamixelCommand)
Receives command to control DYNAMIXEL
Operators
Joint Operators
This package is to make ROS message and publish it to controllers
The configuration of the yaml file is as follows. First, you register joint name when you load from controllers. Seconds, you register motion name. Each motion name has step and time from start. The step size should be same as joint name.
joint:
names: [[name1], [name2]]
motion:
names: [[motion_name1], [motion_name2]]
[motion_name1]:
step: [[position1], [position2]]
time_from_start: [time]
[motion_name2]:
step: [[position1], [position2]]
time_from_start: [time]
.
.
.
Let’s take a look at the motion.yaml file. This file indicates load 2 DYNAMIXEL. First DYNAMIXEL has name ‘pan’ and second DYNAMIXEL has name ‘tilt’. In this file, three motion was registered.
joint:
names: [pan, tilt]
motion:
names: [right, zero, left]
right:
step: [-3.14, -3.14] # radian
time_from_start: 2.0 # sec
zero:
step: [0.0, 0.0]
time_from_start: 3.0
left:
step: [3.14, 3.14]
time_from_start: 6.0
Launch controller and joint_operator.
WARNING: The controller should be set joint_2_0.yaml or joint_1_0.yaml.
$ cd ~/catkin_ws && catkin_make
$ roslaunch dynamixel_workbench_controllers dynamixel_controllers.launch
$ roslaunch dynamixel_workbench_operators joint_operator.launch
If controller load your DYNAMIXEL, you can watch below texts
[ INFO] [1544595828.276238724]: Name : pan, ID : 1, Model Number : 1020
[ INFO] [1544595828.316198852]: Name : tilt, ID : 2, Model Number : 1020
If operator launch succeeded, you can watch below texts
[ INFO] [1544598264.311365515]: motion_name : right, step : -3.140000
[ INFO] [1544598264.311399654]: motion_name : right, step : -3.140000
[ INFO] [1544598264.311414820]: time_from_start : 2.000000
[ INFO] [1544598264.311453292]: motion_name : zero, step : 0.000000
[ INFO] [1544598264.311466789]: motion_name : zero, step : 0.000000
[ INFO] [1544598264.311478179]: time_from_start : 3.000000
[ INFO] [1544598264.311498720]: motion_name : left, step : 3.140000
[ INFO] [1544598264.311524562]: motion_name : left, step : 3.140000
[ INFO] [1544598264.311534826]: time_from_start : 6.000000
[ INFO] [1544598264.313085881]: For now, you can use publish joint trajectory msgs by triggering service(/execution)
When you execute command by ROS service, DYNAMIXEL will rotate.
$ rosservice call /dynamixel_workbench/execution "{}"
NOTE: If you want to repeat motion, you can set True to is_loop argument.
$ roslaunch dynamixel_workbench_operators joint_operator.launch is_loop:=true
Parameters List :
-
namespace
Namespace of this node -
trajectory_info
Trajectory information file path
Topic List :
/joint_trajectory(trajectory_msgs/JointTrajectory)
Send joint trajectory to control DYNAMIXEL
Service List :
/execution(std_srvs/Trigger)
Send command to excute following joint trajectory
Wheel Operators
This package is to make ROS message and publish it to controllers
Launch controller and joint_operator.
WARNING: The controller should be set wheel_2_0.yaml or wheel_1_0.yaml and set true to use_cmd_vel parameter.
$ cd ~/catkin_ws && catkin_make
$ roslaunch dynamixel_workbench_operators wheel_operator.launch
$ roslaunch dynamixel_workbench_controllers dynamixel_controllers.launch use_cmd_vel:=true
If controller load your DYNAMIXEL, you can watch below texts
[ INFO] [1544595828.276238724]: Name : pan, ID : 1, Model Number : 1020
[ INFO] [1544595828.316198852]: Name : tilt, ID : 2, Model Number : 1020
If operator launch succeeded, you can watch below texts
[ INFO] [1544600281.020523635]: You can set '-lin_vel_step' and '-ang_vel_step' arguments (default is 0.01 and 0.1)
[ INFO] [1544600281.021060063]:
Control Your Mobile Robot!
---------------------------
Moving around:
w
a s d
x
w/x : increase/decrease linear velocity
a/d : increase/decrease angular velocity
s : force stop
CTRL-C to quit
Parameters List :
namespace
Namespace of this node
Topic List :
/cmd_vel(geometry_msgs/Twist)
Send command velocity to control DYNAMIXEL
OpenCR and OpenCM Tutorials
DYNAMIXEL Workbench firmware in OpenCR and OpenCM is completely same. You can select any example what you want and upload it.
WARNING: There are some examples that needs to be openned Serial Monitor before it is running. If this code (while(!Serial)
) is activated, please open Serial Monitor.
o_Find_Dynamixel
-
Open
o_Find_Dynamixel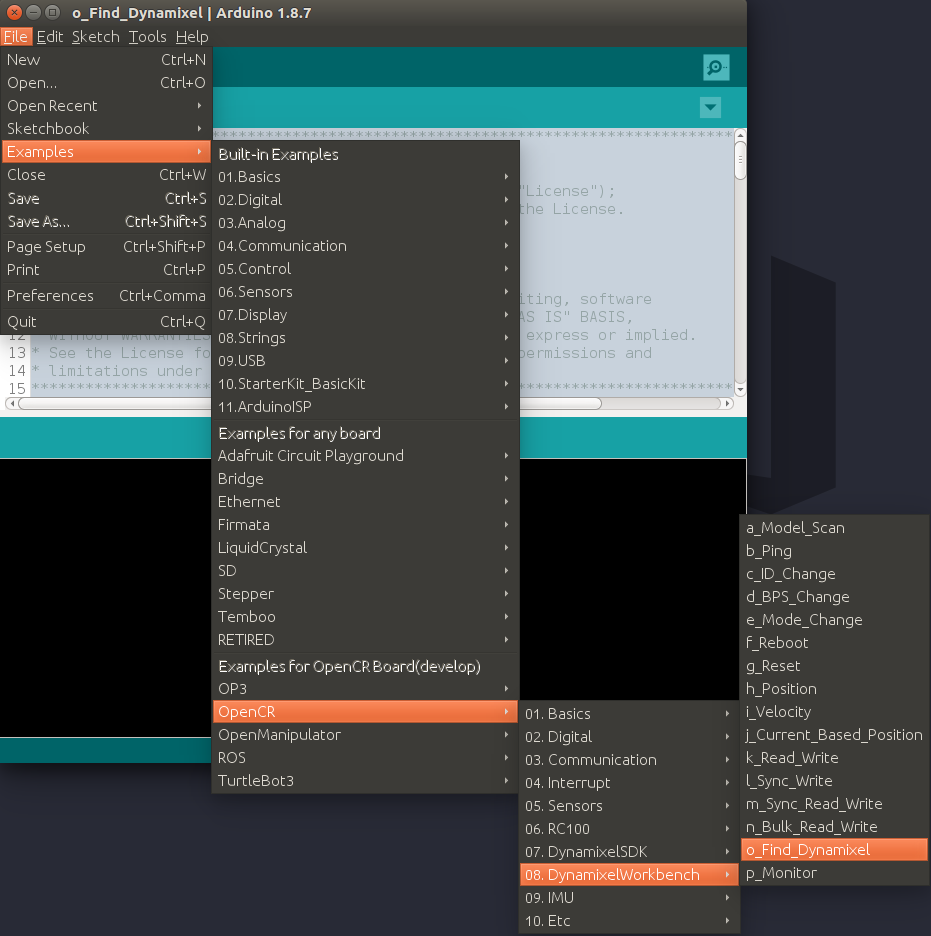
-
Select Port
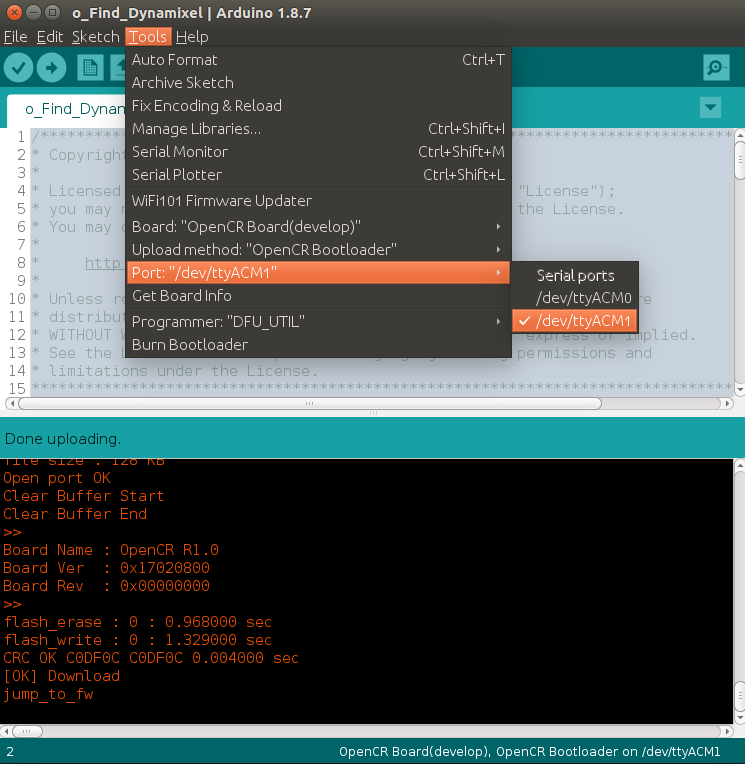
-
Push
Uploadbutton orCTRL+U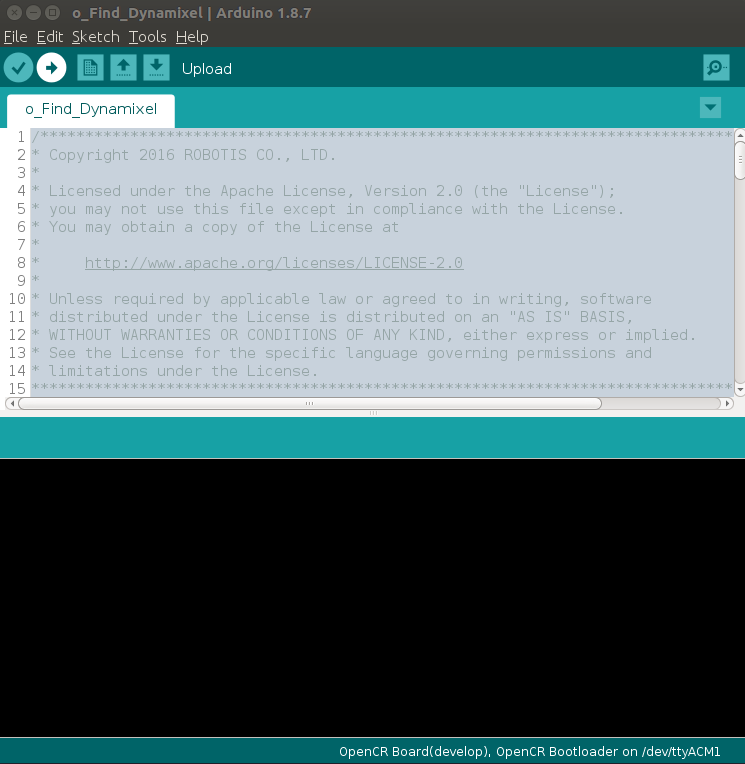
-
You can show if the firmware upload successfully
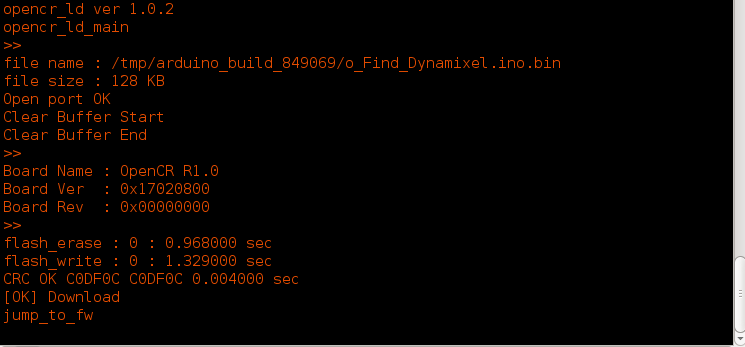
-
Push
Serial Monitorbutton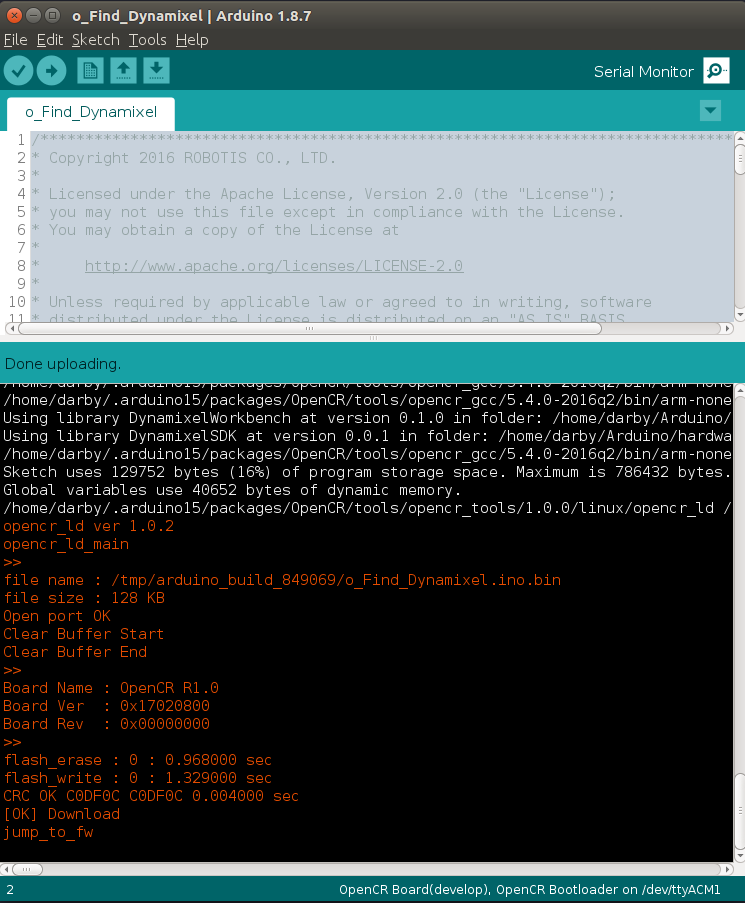
-
Serial monitor starts to scan and find DYNAMIXEL
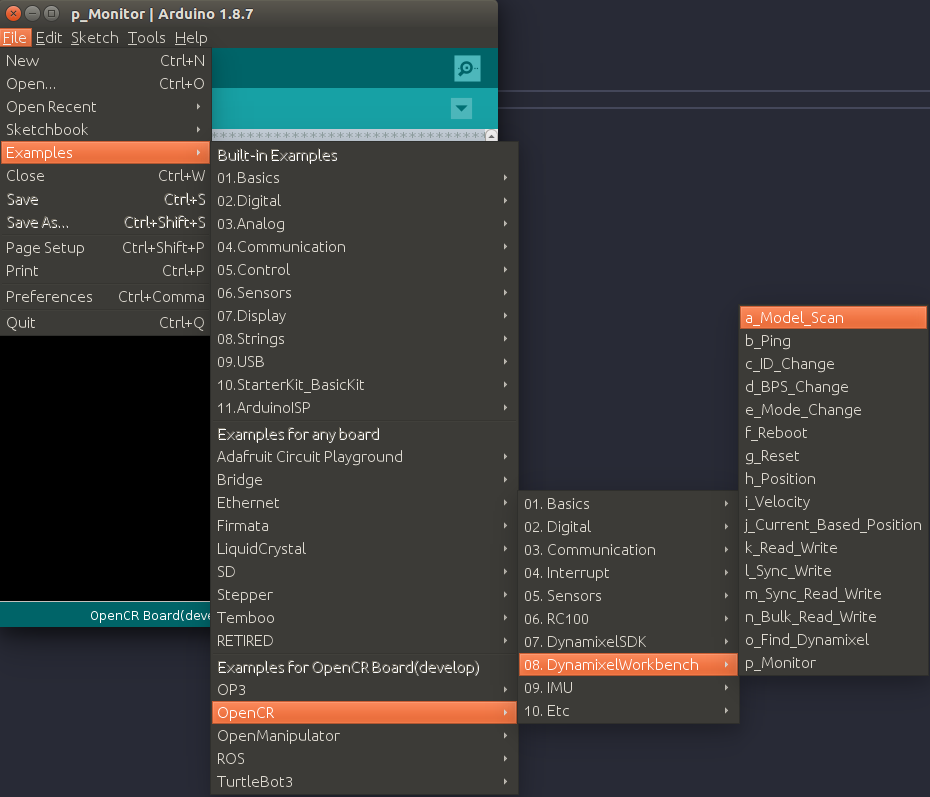
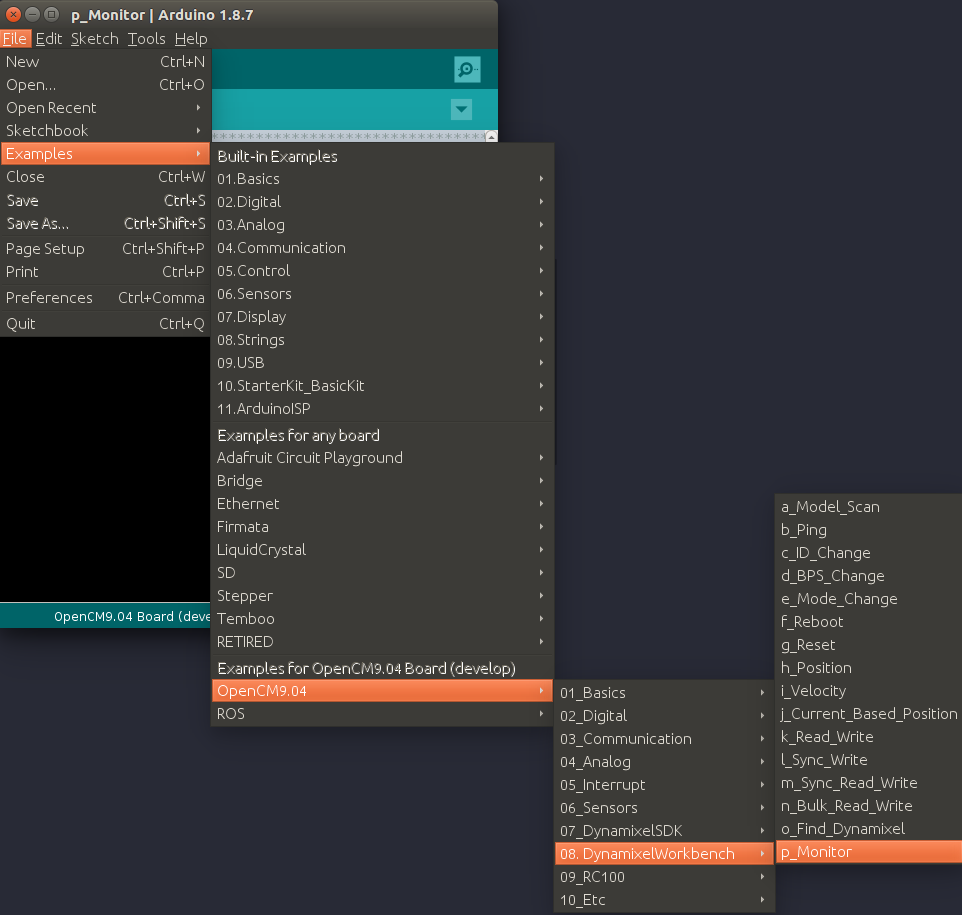
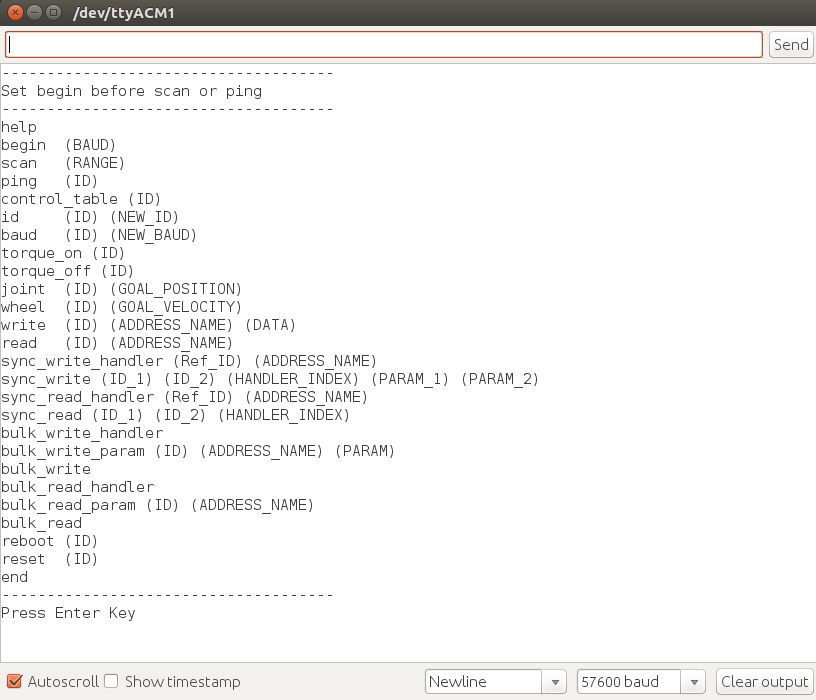
p_Monitor
-
Open
p_Monitor -
Select Port
-
Push
Uploadbutton orCTRL+U -
You can show if the firmware upload successfully
-
Push
Serial Monitorbutton -
Serial monitor shows dynamixel monitor
-
Type
begin 57600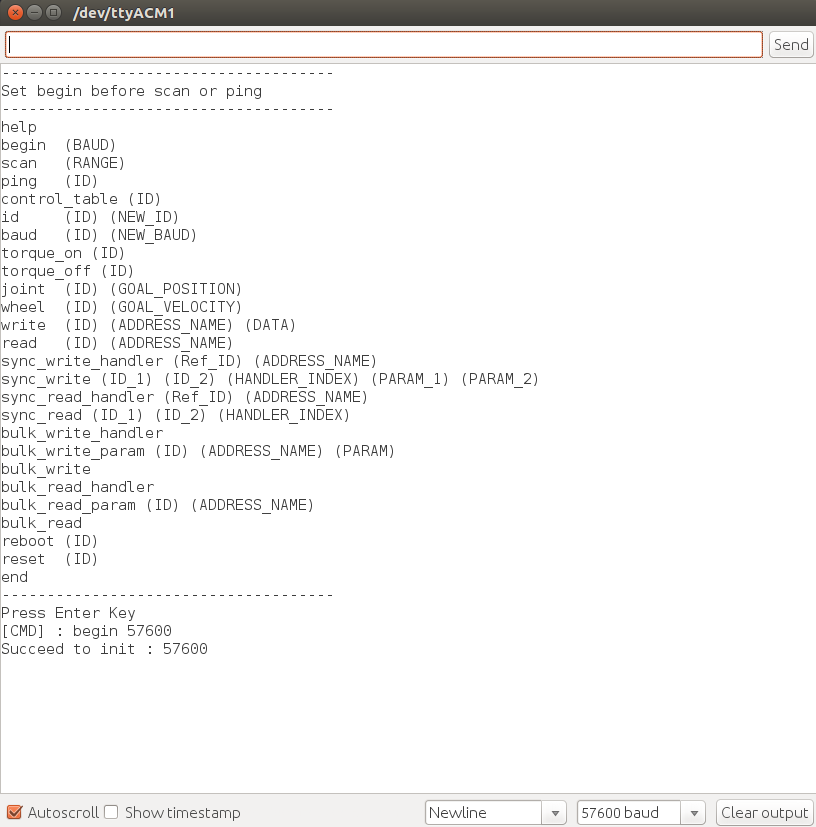
-
Type
scan 10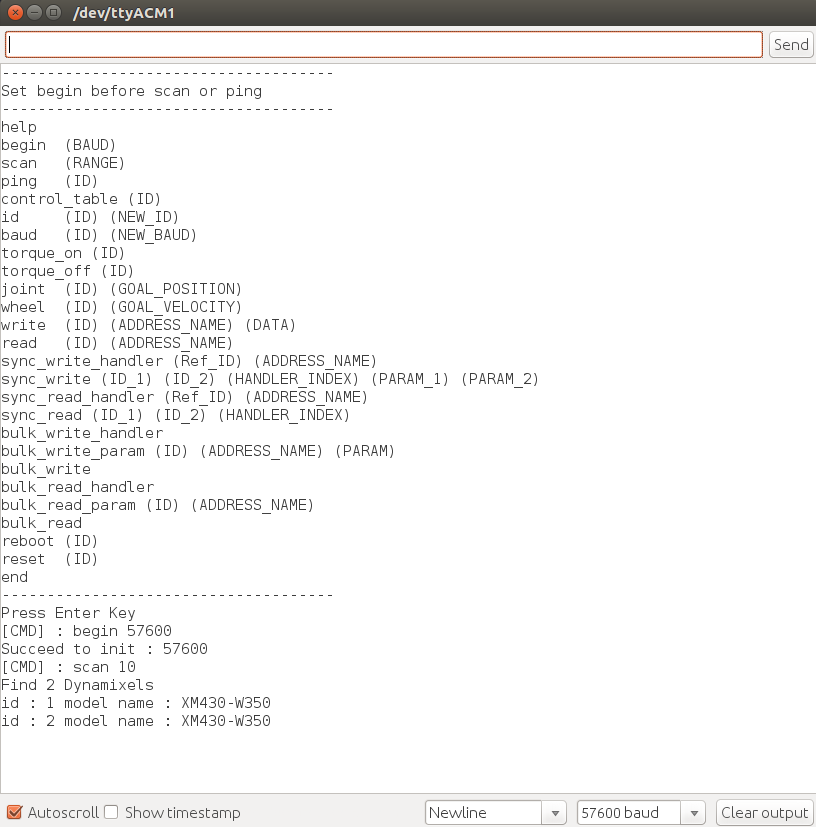
-
Type
torque_on 1andtorque_on 2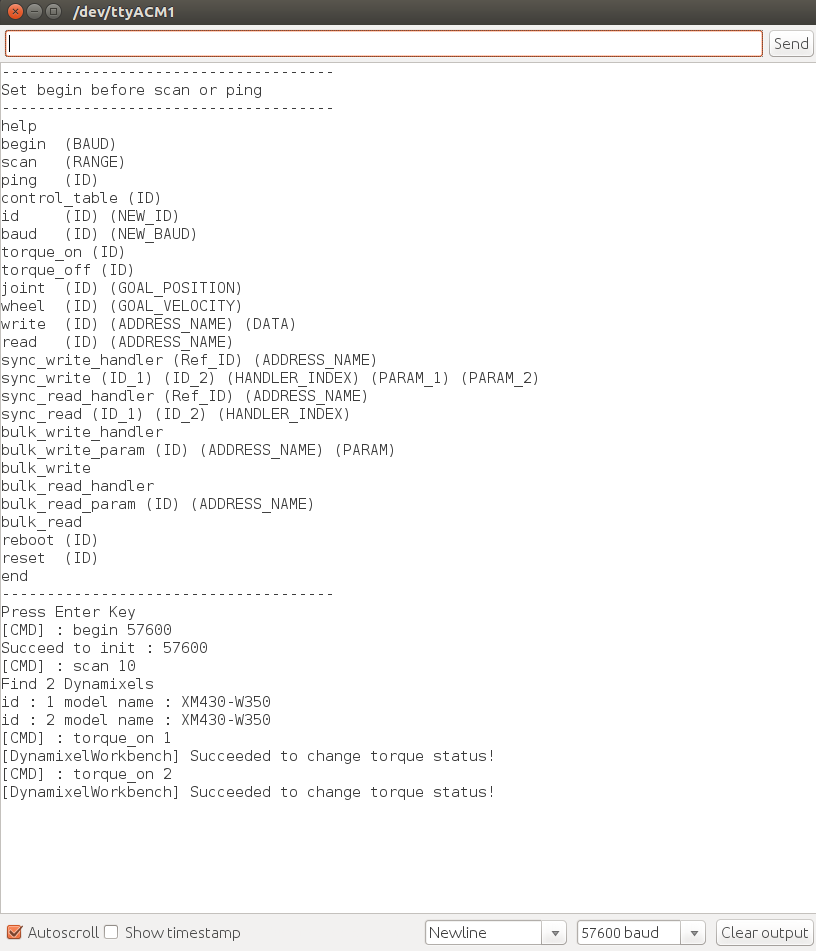
-
Type
sync_write_handler 1 Goal_Position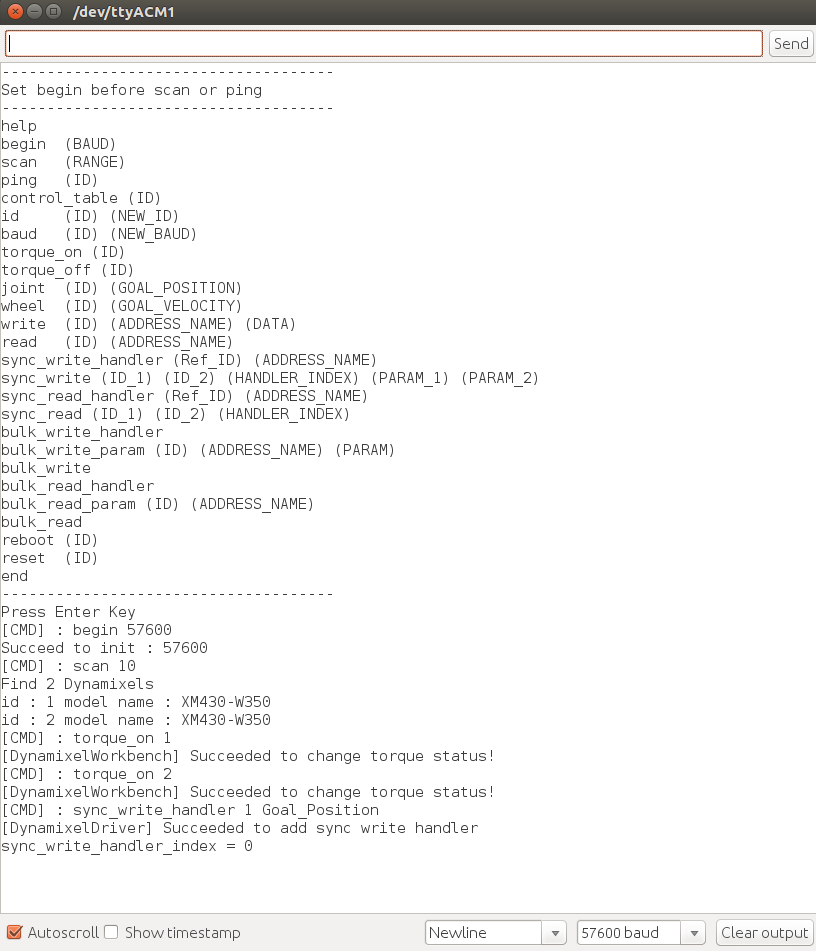
-
Type
sync_write 1 2 0 2048 2048then DYNAMIXEL will rotate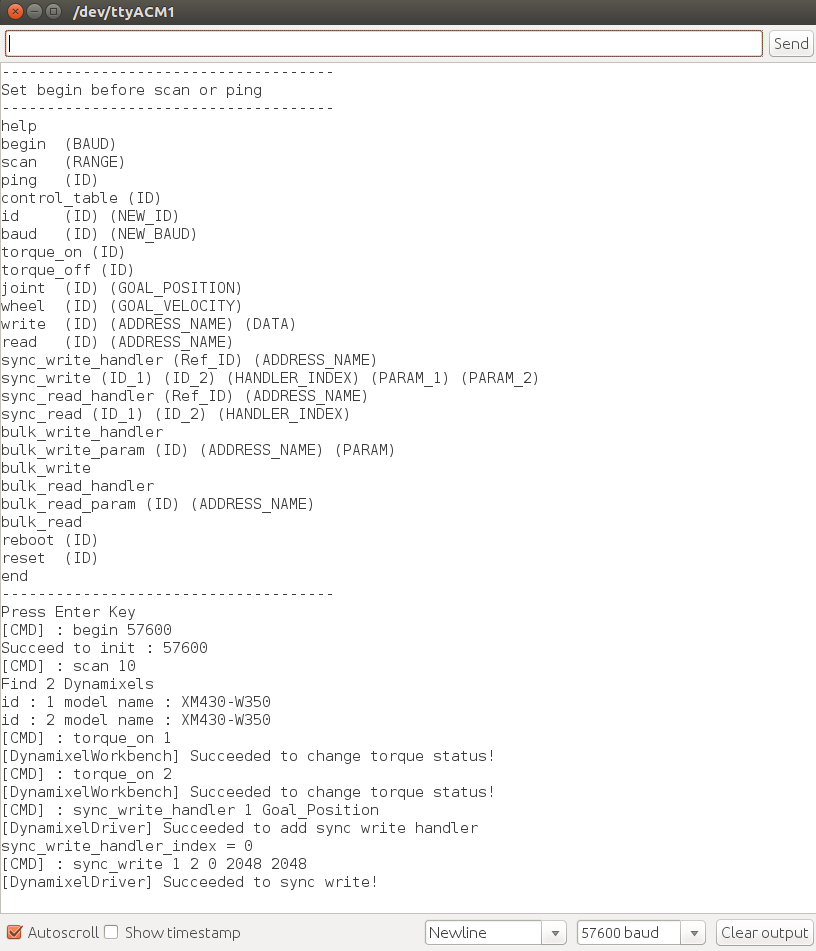
Linux and macOS Tutorials
You can select any example what you want and excute it.
| Item | Examples |
|---|---|
| 1 | model_scan |
| 2 | ping |
| 3 | id_change |
| 4 | bps_change |
| 5 | mode_change |
| 6 | reboot |
| 7 | reset |
| 8 | position |
| 9 | velocity |
| 10 | current_based_position |
| 11 | read_write |
| 12 | sync_write |
| 13 | sync_read_write |
| 14 | bulk_read_write |
| 15 | find_dynamixel |
| 16 | monitor |
TIP: USB port name is different depend on OS. For example, /dev/ttyUSB0, /dev/ttyACM0 in Linux and /dev/cu.usbmodem1411 in macOS
position
-
Open terminal and go to DYNAMIXEL Workbench build folder
$ cd ~/dynamixel-workbench/dynamixel_workbench_toolbox/examples/build -
Excute position (arguments : -port_name -baud_rate -dynamixel_id)
$ ./position /dev/ttyUSB0 57600 1 -
You can watch below texts and DYNAMIXEL will rotate 3 times
Succeed to init(57600) Succeed to ping id : 1, model_number : 1020 Succeed to change joint mode Dynamixel is moving...
bulk_read_write
-
Open terminal and go to DYNAMIXEL Workbench build folder
$ cd ~/dynamixel-workbench/dynamixel_workbench_toolbox/examples/build -
Excute bulk_read_write (arguments : -port_name -baud_rate -dynamixel_id_1 -dynamixel_id_2)
$ ./bulk_read_write /dev/ttyUSB0 57600 1 2 -
You can watch below texts and DYNAMIXEL(dynamixel_id_1) will change rotate direction and another DYNAMIXEL(dynamixel_id_2) will change LED status
Succeed to init(57600) Succeeded to ping id : 1, model_number : 1020 Succeed to change joint mode Succeeded to ping id : 2, model_number : 1020 Succeed to change joint mode [DynamixelDriver] Succeeded to init groupBulkWrite! [DynamixelDriver] Succeeded to init groupBulkRead! [DynamixelDriver] Succeeded to add param for bulk read! [DynamixelDriver] Succeeded to add param for bulk read! [DynamixelDriver] Succeeded to add param for bulk write! [DynamixelDriver] Succeeded to add param for bulk write!
API References
NOTE: We have a plan to publish Doxygen. It will be updated soon.
Function List
bool init(const char* device_name = "/dev/ttyUSB0",
uint32_t baud_rate = 57600,
const char **log = NULL);
bool begin(const char* device_name = "/dev/ttyUSB0",
uint32_t baud_rate = 57600,
const char **log = NULL);
bool setPortHandler(const char *device_name, const char **log = NULL);
bool setBaudrate(uint32_t baud_rate, const char **log = NULL);
bool setPacketHandler(float protocol_version, const char **log = NULL);
float getProtocolVersion(void);
uint32_t getBaudrate(void);
const char * getModelName(uint8_t id, const char **log = NULL);
uint16_t getModelNumber(uint8_t id, const char **log = NULL);
const ControlItem *getControlTable(uint8_t id, const char **log = NULL);
const ControlItem *getItemInfo(uint8_t id, const char *item_name, const char **log = NULL);
uint8_t getTheNumberOfControlItem(uint8_t id, const char **log = NULL);
const ModelInfo* getModelInfo(uint8_t id, const char **log = NULL);
uint8_t getTheNumberOfSyncWriteHandler(void);
uint8_t getTheNumberOfSyncReadHandler(void);
uint8_t getTheNumberOfBulkReadParam(void);
bool scan(uint8_t *get_id,
uint8_t *get_the_number_of_id,
uint8_t range = 253,
const char **log = NULL);
bool scan(uint8_t *get_id,
uint8_t *get_the_number_of_id,
uint8_t start_number,
uint8_t end_number,
const char **log = NULL);
bool ping(uint8_t id,
uint16_t *get_model_number,
const char **log = NULL);
bool ping(uint8_t id,
const char **log = NULL);
bool clearMultiTurn(uint8_t id, const char **log = NULL);
bool reboot(uint8_t id, const char **log = NULL);
bool reset(uint8_t id, const char **log = NULL);
bool writeRegister(uint8_t id, uint16_t address, uint16_t length, uint8_t* data, const char **log = NULL);
bool writeRegister(uint8_t id, const char *item_name, int32_t data, const char **log = NULL);
bool writeOnlyRegister(uint8_t id, uint16_t address, uint16_t length, uint8_t *data, const char **log = NULL);
bool writeOnlyRegister(uint8_t id, const char *item_name, int32_t data, const char **log = NULL);
bool readRegister(uint8_t id, uint16_t address, uint16_t length, uint32_t *data, const char **log = NULL);
bool readRegister(uint8_t id, const char *item_name, int32_t *data, const char **log = NULL);
void getParam(int32_t data, uint8_t *param);
bool addSyncWriteHandler(uint16_t address, uint16_t length, const char **log = NULL);
bool addSyncWriteHandler(uint8_t id, const char *item_name, const char **log = NULL);
bool syncWrite(uint8_t index, int32_t *data, const char **log = NULL);
bool syncWrite(uint8_t index, uint8_t *id, uint8_t id_num, int32_t *data, uint8_t data_num_for_each_id, const char **log = NULL);
bool addSyncReadHandler(uint16_t address, uint16_t length, const char **log = NULL);
bool addSyncReadHandler(uint8_t id, const char *item_name, const char **log = NULL);
bool syncRead(uint8_t index, const char **log = NULL);
bool syncRead(uint8_t index, uint8_t *id, uint8_t id_num, const char **log = NULL);
bool getSyncReadData(uint8_t index, int32_t *data, const char **log = NULL);
bool getSyncReadData(uint8_t index, uint8_t *id, uint8_t id_num, int32_t *data, const char **log = NULL);
bool getSyncReadData(uint8_t index, uint8_t *id, uint8_t id_num, uint16_t address, uint16_t length, int32_t *data, const char **log = NULL);
bool initBulkWrite(const char **log = NULL);
bool addBulkWriteParam(uint8_t id, uint16_t address, uint16_t length, int32_t data, const char **log = NULL);
bool addBulkWriteParam(uint8_t id, const char *item_name, int32_t data, const char **log = NULL);
bool bulkWrite(const char **log = NULL);
bool initBulkRead(const char **log = NULL);
bool addBulkReadParam(uint8_t id, uint16_t address, uint16_t length, const char **log = NULL);
bool addBulkReadParam(uint8_t id, const char *item_name, const char **log = NULL);
bool bulkRead(const char **log = NULL);
bool getBulkReadData(int32_t *data, const char **log = NULL);
bool getBulkReadData(uint8_t *id, uint8_t id_num, uint16_t *address, uint16_t *length, int32_t *data, const char **log = NULL);
bool clearBulkReadParam(void);
bool torque(uint8_t id, bool onoff, const char **log = NULL);
bool torqueOn(uint8_t id, const char **log = NULL);
bool torqueOff(uint8_t id, const char **log = NULL);
bool changeID(uint8_t id, uint8_t new_id, const char **log = NULL);
bool changeBaudrate(uint8_t id, uint32_t new_baudrate, const char **log = NULL);
bool changeProtocolVersion(uint8_t id, uint8_t version, const char **log = NULL);
bool itemWrite(uint8_t id, const char *item_name, int32_t data, const char **log = NULL);
bool itemRead(uint8_t id, const char *item_name, int32_t *data, const char **log = NULL);
bool led(uint8_t id, bool onoff, const char **log = NULL);
bool ledOn(uint8_t id, const char **log = NULL);
bool ledOff(uint8_t id, const char **log = NULL);
bool setNormalDirection(uint8_t id, const char **log = NULL);
bool setReverseDirection(uint8_t id, const char **log = NULL);
bool setVelocityBasedProfile(uint8_t id, const char **log = NULL);
bool setTimeBasedProfile(uint8_t id, const char **log = NULL);
bool setSecondaryID(uint8_t id, uint8_t secondary_id, const char **log = NULL);
bool setCurrentControlMode(uint8_t id, const char **log = NULL);
bool setTorqueControlMode(uint8_t id, const char **log = NULL);
bool setVelocityControlMode(uint8_t id, const char **log = NULL);
bool setPositionControlMode(uint8_t id, const char **log = NULL);
bool setExtendedPositionControlMode(uint8_t id, const char **log = NULL);
bool setMultiTurnControlMode(uint8_t id, const char **log = NULL);
bool setCurrentBasedPositionControlMode(uint8_t id, const char **log = NULL);
bool setPWMControlMode(uint8_t id, const char **log = NULL);
bool setOperatingMode(uint8_t id, uint8_t index, const char **log = NULL);
bool jointMode(uint8_t id, int32_t velocity = 0, int32_t acceleration = 0, const char **log = NULL);
bool wheelMode(uint8_t id, int32_t acceleration = 0, const char **log = NULL);
bool currentBasedPositionMode(uint8_t id, int32_t current = 0, const char **log = NULL);
bool goalPosition(uint8_t id, int32_t value, const char **log = NULL);
bool goalPosition(uint8_t id, float radian, const char **log = NULL);
bool goalVelocity(uint8_t id, int32_t value, const char **log = NULL);
bool goalVelocity(uint8_t id, float velocity, const char **log = NULL);
bool getPresentPositionData(uint8_t id, int32_t* data, const char **log = NULL);
bool getRadian(uint8_t id, float* radian, const char **log = NULL);
bool getPresentVelocityData(uint8_t id, int32_t* data, const char **log = NULL);
bool getVelocity(uint8_t id, float* velocity, const char **log = NULL);
int32_t convertRadian2Value(uint8_t id, float radian);
float convertValue2Radian(uint8_t id, int32_t value);
int32_t convertRadian2Value(float radian, int32_t max_position, int32_t min_position, float max_radian, float min_radian);
float convertValue2Radian(int32_t value, int32_t max_position, int32_t min_position, float max_radian, float min_radian);
int32_t convertVelocity2Value(uint8_t id, float velocity);
float convertValue2Velocity(uint8_t id, int32_t value);
int16_t convertCurrent2Value(float current);
float convertValue2Current(int16_t value);
float convertValue2Load(int16_t value);
Function Reference
bool init(const char* device_name = “/dev/ttyUSB0”, uint32_t baud_rate = 57600, const char **log = NULL)
Description
Initialization portHandler
Input
device_name: Set USB port namebaud_rate: Set baud rate of DYNAMIXEL
Output
If all input is set successfully, return true. If not, return false
bool begin(const char* device_name = “/dev/ttyUSB0”, uint32_t baud_rate = 57600, const char **log = NULL)
Description
Initialization portHandler
Input
device_name: Set USB port namebaud_rate: Set baud rate of DYNAMIXEL
Output
If all input is set successfully, return true. If not, return false
bool setPortHandler(const char *device_name, const char **log = NULL)
Description
Set PortHandler
Input
device_name: Set USB port name
Output
If all input is set successfully, return true. If not, return false
bool setBaudrate(uint32_t baud_rate, const char **log = NULL)
Description
Set baud rate of DYNAMIXEL
Input
baud_rate: Set baud rate of DYNAMIXEL
Output
If all input is set successfully, return true. If not, return false
bool setPacketHandler(float protocol_version, const char **log = NULL)
Description
Set PacketHandler
Input
protocol_version: Set protocol version of DYNAMIXEL
Output
If all input is set successfully, return true. If not, return false
float getProtocolVersion(void)
Description
Get protocol version of PacketHandler
Input
Output
Return protocol version of PacketHandler
uint32_t getBaudrate(void)
Description
Get baud rate of PortHandler
Input
Output
Return baud rate of PortHandler
const char * getModelName(uint8_t id, const char **log = NULL)
Description
Get model name of DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
Return model name
uint16_t getModelNumber(uint8_t id, const char **log = NULL)
Description
Get model number of DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
Return model number
const ControlItem *getControlTable(uint8_t id, const char **log = NULL)
Description
Get control table(including ID, Baud_Rate, Goal_Position, …) of DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
Return control table
const ControlItem *getItemInfo(uint8_t id, const char *item_name, const char **log = NULL)
Description
Get item info in control table of DYNAMIXEL
Input
id: Set DYNAMIXEL IDitem_name: Item name in control table
Output
Return item info
uint8_t getTheNumberOfControlItem(uint8_t id, const char **log = NULL)
Description
Get the number of control item
Input
id: Set DYNAMIXEL ID
Output
Return the number of control item
const ModelInfo* getModelInfo(uint8_t id, const char **log = NULL)
Description
Get model information(RPM, min/max position, …) of DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
Return model information
uint8_t getTheNumberOfSyncWriteHandler(void)
Description
Get the number of sync write handler
Input
Output
Return the number of sync write handler
uint8_t getTheNumberOfSyncReadHandler(void)
Description
Get the number of sync read handler
Input
Output
Return the number of sync read handler
uint8_t getTheNumberOfBulkReadParam(void)
Description
Get the number of bulk read param
Input
Output
Return the number of bulk read param
bool scan(uint8_t *get_id, uint8_t *get_the_number_of_id, uint8_t range = 253, const char **log = NULL)
Description
Ping DYNAMIXEL between ranges. If Ping success, all information on DYNAMIXEL will be saved
Input
get_id: Get found IDsget_the_number_of_id: Get found the number of IDsrange: Set scan range (starts to 0)
Output
If ping instruction successfully work, return true. If not, return false
bool scan(uint8_t *get_id, uint8_t *get_the_number_of_id, uint8_t start_number, uint8_t end_number, const char **log = NULL)
Description
Ping DYNAMIXEL between specific ranges. If Ping success, all information on DYNAMIXEL will be saved
Input
get_id: Get found IDsget_the_number_of_id: Get found the number of IDsstart_number: Set start number for pingend_number: Set end number for ping
Output
If ping instruction successfully work, return true. If not, return false
bool ping(uint8_t id, uint16_t *get_model_number, const char **log = NULL)
Description
Ping DYNAMIXEL. If Ping success, all information on DYNAMIXEL will be saved
Input
id: Set IDget_model_number: Get model number of pinged DYNAMIXEL
Output
If ping instruction successfully work, return true. If not, return false
bool ping(uint8_t id, const char **log = NULL)
Description
Ping DYNAMIXEL. If Ping success, all information on DYNAMIXEL will be saved
Input
id: Set ID
Output
If ping instruction successfully work, return true. If not, return false
bool clearMultiTurn(uint8_t id, const char **log = NULL)
Description
Send clearMultiTurn instruction
Input
id: Set ID
Output
If clearMultiTurn instruction set successfully work, return true. If not, return false
bool reboot(uint8_t id, const char **log = NULL)
Description
Send reboot instruction
Input
id: Set ID
Output
If reboot instruction set successfully work, return true. If not, return false
bool reset(uint8_t id, const char **log = NULL)
Description
Send reset instruction
Input
id: Set ID
Output
If reset instruction set successfully work, return true. If not, return false
bool writeRegister(uint8_t id, uint16_t address, uint16_t length, uint8_t* data, const char **log = NULL)
Description
Write data to DYNAMIXEL and wait the signal include the data are successfully write
Input
id: Set IDaddress: Set address of control table itemlength: Set length of control table itemdata: Set data
Output
If writeTxRx instruction set successfully work, return true. If not, return false
bool writeRegister(uint8_t id, const char *item_name, int32_t data, const char **log = NULL)
Description
Write data to DYNAMIXEL and wait the signal include the data are successfully write
Input
id: Set IDitem_name: Set item name of control table item (ex, Goal_Position, Goal_Velocity,…)data: Set data
Output
If writeTxRx instruction set successfully work, return true. If not, return false
bool writeOnlyRegister(uint8_t id, uint16_t address, uint16_t length, uint8_t *data, const char **log = NULL)
Description
Only write data to DYNAMIXEL. Will not wait any signal
Input
id: Set IDaddress: Set address of control table itemlength: Set length of control table itemdata: Set data
Output
If writeTxOnly instruction set successfully work, return true. If not, return false
bool writeOnlyRegister(uint8_t id, const char *item_name, int32_t data, const char **log = NULL)
Description
Only write data to DYNAMIXEL. Will not wait any signal
Input
id: Set IDitem_name: Set item name of control table item (ex, Goal_Position, Goal_Velocity,…)data: Set data
Output
If writeTxOnly instruction set successfully work, return true. If not, return false
bool readRegister(uint8_t id, uint16_t address, uint16_t length, uint32_t *data, const char **log = NULL)
Description
Read data from DYNAMIXEL
Input
id: Set IDaddress: Set address of control table itemlength: Set length of control table itemdata: Get data
Output
If readTxRx instruction set successfully work, return true. If not, return false
bool readRegister(uint8_t id, const char *item_name, int32_t *data, const char **log = NULL)
Description
Read data from DYNAMIXEL
Input
id: Set IDitem_name: Set item name of control table item (ex, Goal_Position, Goal_Velocity,…)data: Get data
Output
If readTxRx instruction set successfully work, return true. If not, return false
void getParam(int32_t data, uint8_t *param)
Description
Transform 32-bit data to 8-bit parameter
Input
data: Set 32-bit dataparam: Get 8-bit parameter
Output
bool addSyncWriteHandler(uint16_t address, uint16_t length, const char **log = NULL)
Description
Add syncWriteHandler
Input
address: Set address of control table itemlength: Set lengh of control table item
Output
If try to add syncWriteHanlder over the max amount(default is 5), return false. If not, return true
bool addSyncWriteHandler(uint8_t id, const char *item_name, const char **log = NULL)
Description
Add syncWriteHandler
Input
id: Set DYNAMIXEL ID for reference of control tableitem_name: Set item name of control table item (ex, Goal_Position, Goal_Velocity,…)
Output
If try to add syncWriteHanlder over the max amount(default is 5), return false or can’t find item name. If not, return true
bool syncWrite(uint8_t index, int32_t *data, const char **log = NULL)
Description
Execute sync write to all pinged DYNAMIXEL
Input
index: Set index of syncWriteHandlerdata: Set data
Output
If addParam or txPacket instruction set successfully work, return true. If not, return false
bool syncWrite(uint8_t index, uint8_t *id, uint8_t id_num, int32_t *data, uint8_t data_num_for_each_id, const char **log = NULL)
Description
Execute sync write to some DYNAMIXEL
Input
index: Set index of syncWriteHandlerid: Set IDsid_num: Set the number of IDsdata: Set datadata_num_for_each_id: Set the number of data for each ID
Output
If addParam or txPacket instruction set successfully work, return true. If not, return false
bool addSyncReadHandler(uint16_t address, uint16_t length, const char **log = NULL)
Description
Add syncReadHandler
Input
address: Set address of control table itemlength: Set lengh of control table item
Output
If try to add syncReadHandler over the max amount(default is 5), return false. If not, return true
bool addSyncReadHandler(uint8_t id, const char *item_name, const char **log = NULL)
Description
Add syncReadHandler
Input
id: Set DYNAMIXEL ID for reference of control tableitem_name: Set item name of control table item (ex, Goal_Position, Goal_Velocity,…)
Output
If try to add syncReadHandler over the max amount(default is 5), return false or can’t find item name. If not, return true
bool syncRead(uint8_t index, const char **log = NULL)
Description
Execute sync read from all pinged DYNAMIXEL
Input
index: Set index of syncWriteHandler
Output
If addParam or txRxPacket instruction set successfully work, return true. If not, return false
bool syncRead(uint8_t index, uint8_t *id, uint8_t id_num, const char **log = NULL)
Description
Execute sync read from some DYNAMIXEL
Input
index: Set index of syncWriteHandlerid: Set IDsid_num: Set the number of IDs
Output
If addParam or txRxPacket instruction set successfully work, return true. If not, return false
bool getSyncReadData(uint8_t index, int32_t *data, const char **log = NULL)
Description
Get data read by syncRead function from all pinged DYNAMIXEL
Input
index: Set index of syncWriteHandlerdata: Get data
Output
If isAvailable instruction set successfully work, return true. If not, return false
bool getSyncReadData(uint8_t index, uint8_t *id, uint8_t id_num, int32_t *data, const char **log = NULL)
Description
Get data read by syncRead function from some DYNAMIXEL
Input
index: Set index of syncWriteHandlerid: Set IDsid_num: Set the number of IDsdata: Get data
Output
If isAvailable instruction set successfully work, return true. If not, return false
bool getSyncReadData(uint8_t index, uint8_t *id, uint8_t id_num, uint16_t address, uint16_t length, int32_t *data, const char **log = NULL)
Description
Get data read by syncRead function from some DYNAMIXEL
Input
index: Set index of syncWriteHandlerid: Set IDsid_num: Set the number of IDsaddress: Set address of control table itemlength: Set lengh of control table itemdata: Get data
Output
If isAvailable instruction set successfully work, return true. If not, return false
bool initBulkWrite(const char **log = NULL)
Description
Initialization bulkWriteHandler
Input
Output
If portHanlder and packetHandler is loaded successfully work, return true. If not, return false
bool addBulkWriteParam(uint8_t id, uint16_t address, uint16_t length, int32_t data, const char **log = NULL)
Description
Add parameter for bulkWrite
Input
id: Set IDsaddress: Set address of control table itemlength: Set lengh of control table itemdata: Set data
Output
If addParam instruction set successfully work, return true. If not, return false
bool addBulkWriteParam(uint8_t id, const char *item_name, int32_t data, const char **log = NULL)
Description
Add parameter for bulkWrite
Input
id: Set DYNAMIXEL ID for reference of control tableitem_name: Set item name of control table item (ex, Goal_Position, Goal_Velocity,…)data: Set data
Output
If addParam instruction set successfully work, return true. If not, return false
bool bulkWrite(const char **log = NULL)
Description
Execute bulkWrite
Input
Output
If txPacket instruction set successfully work, return true. If not, return false
bool initBulkRead(const char **log = NULL)
Description
Initialization bulkReadHandler
Input
Output
If portHanlder and packetHandler is loaded successfully work, return true. If not, return false
bool addBulkReadParam(uint8_t id, uint16_t address, uint16_t length, const char **log = NULL)
Description
Add parameter for bulkRead
Input
id: Set IDsaddress: Set address of control table itemlength: Set lengh of control table itemdata: Set data
Output
If addParam instruction set successfully work, return true. If not, return false
bool addBulkReadParam(uint8_t id, const char *item_name, const char **log = NULL)
Description
Add parameter for bulkRead
Input
id: Set DYNAMIXEL ID for reference of control tableitem_name: Set item name of control table item (ex, Goal_Position, Goal_Velocity,…)data: Set data
Output
If addParam instruction set successfully work, return true. If not, return false
bool bulkRead(const char **log = NULL)
Description
Execute bulkRead
Input
Output
If txRxPacket instruction set successfully work, return true. If not, return false
bool getBulkReadData(int32_t *data, const char **log = NULL)
Description
Get data read by bulkRead function from all pinged DYNAMIXEL
Input
data: Get data
Output
If isAvailable instruction set successfully work, return true. If not, return false
bool getBulkReadData(uint8_t *id, uint8_t id_num, uint16_t *address, uint16_t *length, int32_t *data, const char **log = NULL)
Description
Get data read by bulkRead function from some DYNAMIXEL
Input
id: Set IDsid_num: Set the number of IDsaddress: Set address of control table itemlength: Set lengh of control table itemdata: Get data
Output
If isAvailable instruction set successfully work, return true. If not, return false
bool clearBulkReadParam(void)
Description
Clear every paramter for bulkRead
Input
Output
If clearParam instruction set successfully work, return true. If not, return false
bool torque(uint8_t id, bool onoff, const char **log = NULL)
Description
Set torque to DYNAMIXEL
Input
id: Set DYNAMIXEL IDonoff: Set true or false
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool torqueOn(uint8_t id, const char **log = NULL)
Description
Set torque on to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool torqueOff(uint8_t id, const char **log = NULL)
Description
Set torque off to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool changeID(uint8_t id, uint8_t new_id, const char **log = NULL)
Description
Change DYNAMIXEL ID
Input
id: Set DYNAMIXEL IDnew_id: Set DYNAMIXEL new ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool changeBaudrate(uint8_t id, uint32_t new_baudrate, const char **log = NULL)
Description
Change baud rate of DYNAMIXEL
Input
id: Set DYNAMIXEL IDnew_baudrate: Set new baudrate for DYNAMIXEL
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool changeProtocolVersion(uint8_t id, uint8_t version, const char **log = NULL)
Description
Change protocol version of DYNAMIXEL
Input
id: Set DYNAMIXEL IDversion: Set protocol version for DYNAMIXEL
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool itemWrite(uint8_t id, const char *item_name, int32_t data, const char **log = NULL)
Description
Write data to control table item
Input
id: Set DYNAMIXEL IDitem_name: Set item name of control table item (ex, Goal_Position, Goal_Velocity,…)data: Set data
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool itemRead(uint8_t id, const char *item_name, int32_t *data, const char **log = NULL)
Description
Read data to control table item
Input
id: Set DYNAMIXEL IDitem_name: Set item name of control table item (ex, Goal_Position, Goal_Velocity,…)data: Get data
Output
If readByteTxRx instruction set successfully work, return true. If not, return false
bool led(uint8_t id, bool onoff, const char **log = NULL)
Description
Set led on or off to DYNAMIXEL
Input
id: Set DYNAMIXEL IDonoff: Set true or false
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool ledOn(uint8_t id, const char **log = NULL)
Description
Set led on to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool ledOff(uint8_t id, const char **log = NULL)
Description
Set led on or off to DYNAMIXEL
Input
id: Set DYNAMIXEL IDonoff: Set true or false
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setNormalDirection(uint8_t id, const char **log = NULL)
Description
Set DYNAMIXEL rotate with normal direction(counter clockwise)
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setReverseDirection(uint8_t id, const char **log = NULL)
Description
Set DYNAMIXEL rotate with reverse direction(clockwise)
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setVelocityBasedProfile(uint8_t id, const char **log = NULL)
Description
Set DYNAMIXEL will make velocity based profile
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setTimeBasedProfile(uint8_t id, const char **log = NULL)
Description
Set DYNAMIXEL will make time based profile
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setSecondaryID(uint8_t id, uint8_t secondary_id, const char **log = NULL)
Description
Set secondary ID to DYNAMIXEL
Input
id: Set DYNAMIXEL IDsecondary_id: Set DYNAMIXEL secondary ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setCurrentControlMode(uint8_t id, const char **log = NULL)
Description
Set current control mode to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setTorqueControlMode(uint8_t id, const char **log = NULL)
Description
Set torque control mode to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setVelocityControlMode(uint8_t id, const char **log = NULL)
Description
Set velocity control mode to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setPositionControlMode(uint8_t id, const char **log = NULL)
Description
Set position control mode to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setExtendedPositionControlMode(uint8_t id, const char **log = NULL)
Description
Set extended position control mode to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setMultiTurnControlMode(uint8_t id, const char **log = NULL)
Description
Set multi-turn control mode to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setCurrentBasedPositionControlMode(uint8_t id, const char **log = NULL)
Description
Set current based position control mode to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setPWMControlMode(uint8_t id, const char **log = NULL)
Description
Set PWM control mode to DYNAMIXEL
Input
id: Set DYNAMIXEL ID
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool setOperatingMode(uint8_t id, uint8_t index, const char **log = NULL)
Description
Set operating mode to DYNAMIXEL
Input
id: Set DYNAMIXEL IDindex: Choose what you want to set operating mode
- Index list
static const uint8_t CURRENT_CONTROL_MODE = 0; static const uint8_t VELOCITY_CONTROL_MODE = 1; static const uint8_t POSITION_CONTROL_MODE = 3; static const uint8_t EXTENDED_POSITION_CONTROL_MODE = 4; static const uint8_t CURRENT_BASED_POSITION_CONTROL_MODE = 5; static const uint8_t PWM_CONTROL_MODE = 16; static const uint8_t TORQUE_CONTROL_MODE = 100; static const uint8_t MULTI_TURN_MODE = 101;
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool jointMode(uint8_t id, int32_t velocity = 0, int32_t acceleration = 0, const char **log = NULL)
Description
Set joint mode to DYNAMIXEL. You can simply set joint mode to any DYNAMIXEL. After joint mode successfully set, torque will be on.
The velocity and acceleration parameters will be used argument to make profile.
Input
id: Set DYNAMIXEL IDvelocity: Set profile velocityacceleration: Set profile acceleration
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool wheelMode(uint8_t id, int32_t acceleration = 0, const char **log = NULL)
Description
Set wheel mode to DYNAMIXEL. You can simply set wheel mode to any DYNAMIXEL. After wheel mode successfully set, torque will be on.
The acceleration parameters will be used argument to make profile.
Input
id: Set DYNAMIXEL IDacceleration: Set profile acceleration
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool currentBasedPositionMode(uint8_t id, int32_t current = 0, const char **log = NULL)
Description
Set currrent based position mode to DYNAMIXEL. You can simply set joint mode controlled by current to DYNAMIXEL-X series. After mode successfully set, torque will be on.
The current parameters will be used argument to make profile.
Input
id: Set DYNAMIXEL IDcurrent: Set current limit
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool goalPosition(uint8_t id, int32_t value, const char **log = NULL)
Description
Set position to DYNAMIXEL
Input
id: Set DYNAMIXEL IDvalue: Set 32-bit raw value
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool goalPosition(uint8_t id, float radian, const char **log = NULL)
Description
Set position to DYNAMIXEL
Input
id: Set DYNAMIXEL IDradian: Set position. Unit is radian
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool goalVelocity(uint8_t id, int32_t value, const char **log = NULL)
Description
Set velocity to DYNAMIXEL
Input
id: Set DYNAMIXEL IDvalue: Set 32-bit raw value
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool goalVelocity(uint8_t id, float velocity, const char **log = NULL)
Description
Set velocity to DYNAMIXEL
Input
id: Set DYNAMIXEL IDvelocity: Set velocity. Unit is m/s
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool getPresentPositionData(uint8_t id, int32_t* data, const char **log = NULL)
Description
Get present position from DYNAMIXEL
Input
id: Set DYNAMIXEL IDdata: Get 32-bit raw data
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool getRadian(uint8_t id, float* radian, const char **log = NULL)
Description
Get present position from DYNAMIXEL
Input
id: Set DYNAMIXEL IDradian: Get position. Unit is radian
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool getPresentVelocityData(uint8_t id, int32_t* data, const char **log = NULL)
Description
Get present velocity from DYNAMIXEL
Input
id: Set DYNAMIXEL IDdata: Get 32-bit raw data
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
bool getVelocity(uint8_t id, float* velocity, const char **log = NULL)
Description
Get present velocity from DYNAMIXEL
Input
id: Set DYNAMIXEL IDvelocity: Get velocity. Unit is m/s
Output
If writeByteTxRx instruction set successfully work, return true. If not, return false
int32_t convertRadian2Value(uint8_t id, float radian)
Description
Convert radian to 32-bit raw data
Input
id: Set DYNAMIXEL IDradian: Set position. Unit is radian
Output
Return 32-bit raw data for DYNAMIXEL
float convertValue2Radian(uint8_t id, int32_t value)
Description
Convert 32-bit raw data to radian
Input
id: Set DYNAMIXEL IDvalue: Get 32-bit raw data
Output
Return position. Unit is radian
int32_t convertRadian2Value(float radian, int32_t max_position, int32_t min_position, float max_radian, float min_radian)
Description
Convert radian to 32-bit raw data
Input
radian: Set position. Unit is radianmax_position: Set max position. Unit is 32-bit raw datamin_position: Set min position. Unit is 32-bit raw datamax_radian: Set max radianmin_radian: Set min radian
Output
Return 32-bit raw data for DYNAMIXEL
float convertValue2Radian(int32_t value, int32_t max_position, int32_t min_position, float max_radian, float min_radian)
Description
Convert 32-bit raw data to radian
Input
value: Set 32-bit raw datamax_position: Set max position. Unit is 32-bit raw datamin_position: Set min position. Unit is 32-bit raw datamax_radian: Set max radianmin_radian: Set min radian
Output
Return position. Unit is radian
int32_t convertVelocity2Value(uint8_t id, float velocity)
Description
Convert velocity to 32-bit raw data
Input
id: Set DYNAMIXEL IDvelocity: Set velocity. Unit is m/s
Output
Return 32-bit raw data
float convertValue2Velocity(uint8_t id, int32_t value)
Description
Convert 32-bit raw data to velocity
Input
id: Set DYNAMIXEL IDvalue: Set 32-bit raw data
Output
Return velocity. Unit is m/s
int16_t convertCurrent2Value(float current)
Description
Convert current to 16-bit raw data.
Input
current: Set current. Unit is m/A
Output
Return 16-bit raw data
float convertValue2Current(int16_t value)
Description
Convert 16-bit raw data to current
Input
value: Set 16-bit raw data
Output
Return current. Unit is m/A
float convertValue2Load(int16_t value)
Description
Convert 16-bit raw data to load
Input
value: Set 16-bit raw data
Output
Return load. Unit is %