
Features
![]()
 Click here to expand more details about each features
Click here to expand more details about each features
World’s Most Popular ROS Platform
- TurtleBot is the most popular open source robot for education and research. The
TurtleBot3in specific is a small, low cost, fully customizable, ROS based mobile robot platform intended to be used for education, research, hobby projects, and product prototyping.
Affordable
- TurtleBot3 was developed to meet the cost-conscious needs of schools, laboratories and companies. TurtleBot3 is the most affordable SLAM-able mobile robot equipped with a 360° Laser Distance Sensor LDS-02.
Small Size
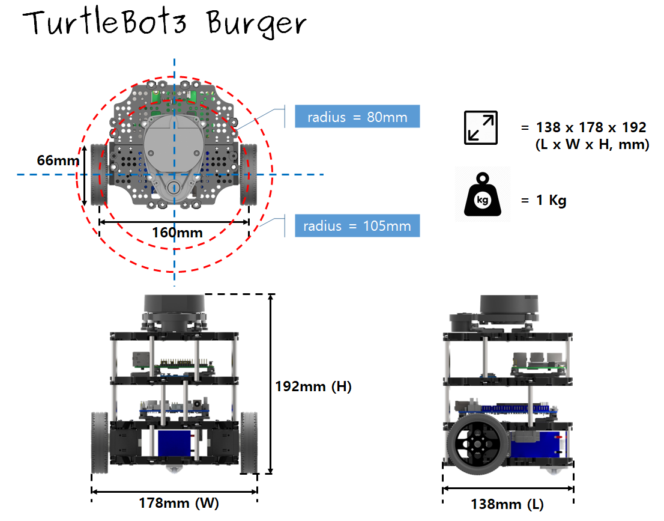
- The dimensions of the TurtleBot3 Burger are only 138mm x 178mm x 192mm (L x W x H). It’s size is about 1/4 of the size of it’s predecessor. Imagine keeping TurtleBot3 in your backpack, providing the ability develop your system and test it anywhere you go.
ROS Standard
- The TurtleBot brand is managed by Open Robotics, which develops and maintains ROS. Nowadays, ROS has become the go-to platform for roboticists around the world. The TurtleBot family can be integrated with existing ROS-based robot components, but TurtleBot3 is designed to be an affordable base platform for those who want to get started learning ROS.
Extensibility
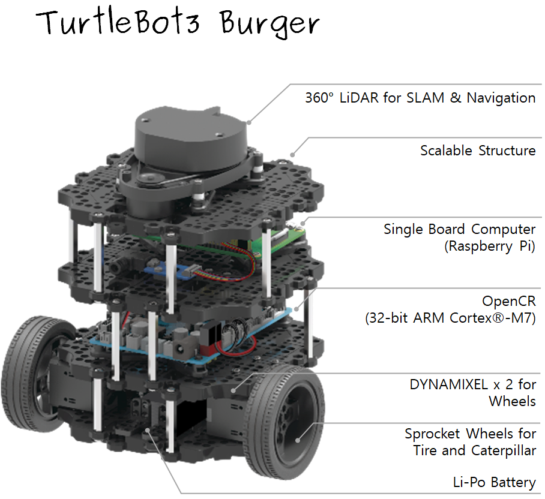
- TurtleBot3 encourages users to customize its mechanical structure with some alternative options: The platform consists of an open source embedded board (as a motor control board), a single board computer as the main compute unit, and lidar or visual sensors plased on a a two-wheeled differential drive platform. Beyond this the TurtleBot3 platform is able to be structurally and mechanically customized in many ways: Cars, Bikes, Trailers and so on. Extend your ideas beyond imagination with various SBC, sensors and motors on a scalable structure.
Modular Actuator for Mobile Robot
- TurtleBot3 is able to get a precise spatial data by using 2 DYNAMIXEL smart servos in the wheel joints. The DYNAMIXEL XM series can be operated in one of 6 operating modes(XL series: 4 operating modes): Velocity control mode for wheels, Torque control mode or Position control mode for joint, etc. DYNAMIXELs can also used even to make a mobile manipulator which is light but can be precisely controlled with velocity, torque and position control. DYNAMIXEL is a core component that makes TurtleBot3 more flexible than other competing platforms, making it easy to assemble, maintain, replace and reconfigure.
Open Control Board for ROS
- The control board is open-source hardware and software for ROS communication. The open source control board OpenCR1.0 is powerful enough to control not only DYNAMIXEL’s but also ROBOTIS sensors that are frequently being used for basic recognition tasks in cost effective way. Various sensors such including Touch sensors, Infrared sensors, Color sensors and a handful more are available. The OpenCR1.0 has an IMU sensor inside the board to provide precision motion tracking for countless applications. The board has 3.3V, 5V, and 12V power supplies to maximize compatibility with external components.
Strong Sensor Lineups
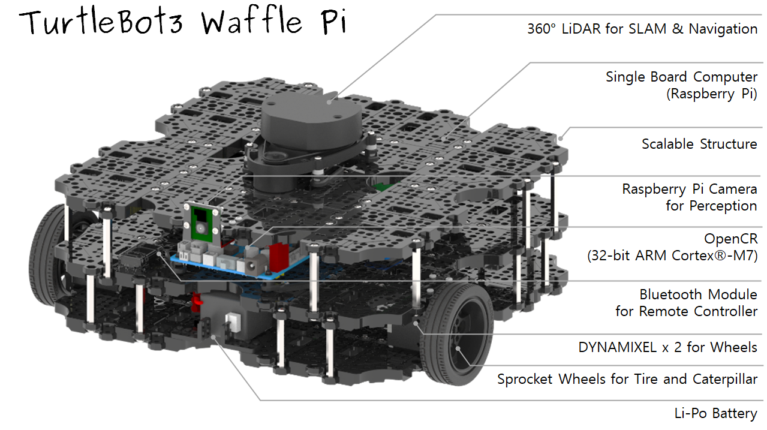
- The TurtleBot3 Burger features enhanced 360° LiDAR, a 9-Axis Inertial Measurement Unit and precise encoder to empower your research and development. TurtleBot3 Waffle is equipped with an identical 360° LiDAR as well but additionally proposes a powerful RaspberryPi Camera for visual recognition.
Open Source
- The hardware, firmware and software of TurtleBot3 are open source which means that users are welcome to download, modify and share the source code. All components of TurtleBot3 are manufactured with injection molded plastic to achieve low cost, however, the 3D CAD data is also available for 3D printing.
The 3D CAD data is released via Onshape which is a full-cloud 3D CAD editor. Users can get an access with a web browser on desktop PC, laptop and even portable devices. Onshape allows to draw 3D models and to assemble them with colleagues. Besides, for the users who want to make or modify an OpenCR1.0 board by themselves, all details of the OpenCR1.0 board such as schematics, PCB gerber files, BOM and firmware source code are fully available under open-source licenses for users and the ROS community.
Specifications
Hardware Specifications
| Items | Burger | Waffle Pi |
|---|---|---|
| Maximum translational velocity | 0.22 m/s | 0.26 m/s |
| Maximum rotational velocity | 2.84 rad/s (162.72 deg/s) | 1.82 rad/s (104.27 deg/s) |
| Maximum payload | 15kg | 30kg |
| Size (L x W x H) | 138mm x 178mm x 192mm | 281mm x 306mm x 141mm |
| Weight (+ SBC + Battery + Sensors) | 1kg | 1.8kg |
| Climbing Threshold | 10 mm or lower | 10 mm or lower |
| Expected operating time | 2h 30m | 2h |
| Expected charging time | 2h 30m | 2h 30m |
| SBC (Single Board Computer) | Raspberry Pi 4 | Raspberry Pi 4 |
| MCU | 32-bit ARM Cortex®-M7 with FPU (216 MHz, 462 DMIPS) | 32-bit ARM Cortex®-M7 with FPU (216 MHz, 462 DMIPS) |
| Remote Controller | - | RC-100B + BT-410 Set (Bluetooth 4, BLE) |
| Actuator | XL430-W250 | XM430-W210 |
| LDS (Laser Distance Sensor) | 360 Laser Distance Sensor LDS-02 | 360 Laser Distance Sensor LDS-02 |
| Camera | - | Raspberry Pi Camera Module v2.1 |
| IMU | Gyroscope 3 Axis Accelerometer 3 Axis |
Gyroscope 3 Axis Accelerometer 3 Axis |
| Power connectors | 3.3V / 800mA 5V / 4A 12V / 1A |
3.3V / 800mA 5V / 4A 12V / 1A |
| Expansion pins | GPIO 18 pins Arduino 32 pin |
GPIO 18 pins Arduino 32 pin |
| Peripheral Connections | UART x3, CAN x1, SPI x1, I2C x1, ADC x5, 5pin OLLO x4 | UART x3, CAN x1, SPI x1, I2C x1, ADC x5, 5pin OLLO x4 |
| DYNAMIXEL ports | RS485 x 3, TTL x 3 | RS485 x 3, TTL x 3 |
| Audio | Several programmable beep sequences | Several programmable beep sequences |
| Programmable LEDs | User LED x 4 | User LED x 4 |
| Status LEDs | Board status LED x 1 Arduino LED x 1 Power LED x 1 |
Board status LED x 1 Arduino LED x 1 Power LED x 1 |
| Buttons and Switches | Push buttons x 2, Reset button x 1, Dip switch x 2 | Push buttons x 2, Reset button x 1, Dip switch x 2 |
| Battery | Lithium polymer 11.1V 1800mAh / 19.98Wh 5C | Lithium polymer 11.1V 1800mAh / 19.98Wh 5C |
| PC Connection | USB | USB |
| Firmware Upgrade | via USB / via JTAG | via USB / via JTAG |
| Power Adapter (SMPS) | Input : 100-240V, AC 50/60Hz, 1.5A @max Output : 12V DC, 5A |
Input : 100-240V, AC 50/60Hz, 1.5A @max Output : 12V DC, 5A |
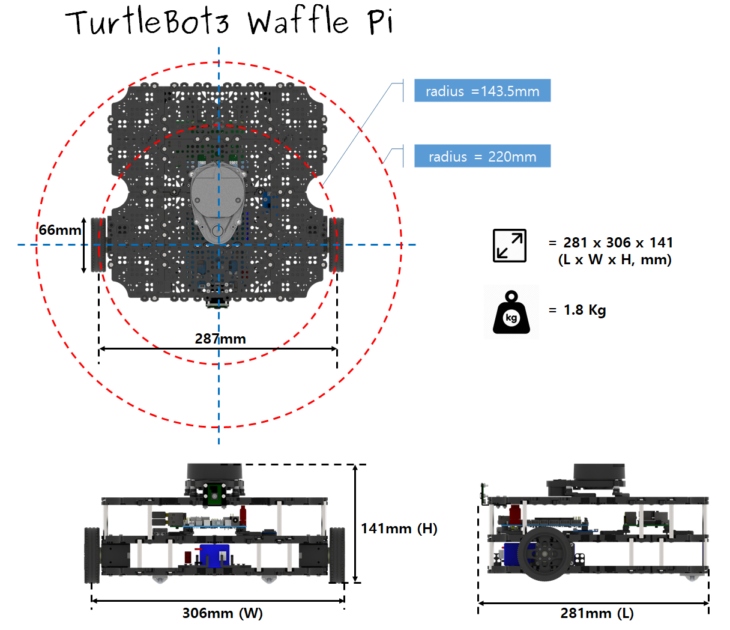
Dimension and Mass
Data of TurtleBot3 Burger
Data of TurtleBot3 Waffle Pi
Components
Parts List
TurtleBot3 is available in two types of models: Burger and Waffle Pi.
The following table shows the lists of components. The major differences between two models are the actuators, the SBC(Single Board Computer) and the Sensors.
| Part Name | Burger | Waffle Pi | |
|---|---|---|---|
| Chassis Parts | Waffle Plate | 8 | 24 |
| . | Plate Support M3x35mm | 4 | 12 |
| . | Plate Support M3x45mm | 10 | 10 |
| . | PCB Support | 12 | 12 |
| . | Wheel | 2 | 2 |
| . | Tire | 2 | 2 |
| . | Ball Caster | 1 | 2 |
| . | Camera Bracket | 0 | 1 |
| Motors | DYNAMIXEL (XL430-W250-T) | 2 | 0 |
| . | DYNAMIXEL (XM430-W210-T) | 0 | 2 |
| Boards | OpenCR1.0 | 1 | 1 |
| . | *Raspberry Pi | 1 | 1 |
| . | USB2LDS | 1 | 1 |
| Remote Controllers | BT-410 Set (Bluetooth 4, BLE) | 0 | 1 |
| . | RC-100B (Remote Controller) | 0 | 1 |
| Sensors | **LDS-01 or LDS-02 | 1 | 1 |
| . | Raspberry Pi Camera v2.1 | 0 | 1 |
| Memory | MicroSD Card | 1 | 1 |
| Cables | Raspberry Pi Power Cable | 1 | 1 |
| . | Li-Po Battery Extension Cable | 1 | 1 |
| . | DYNAMIXEL to OpenCR Cable | 2 | 2 |
| . | USB Cable | 2 | 2 |
| . | Camera Cable | 0 | 1 |
| Powers | SMPS 12V5A | 1 | 1 |
| . | A/C Cord | 1 | 1 |
| . | LIPO Battery 11.1V 1,800mAh | 1 | 1 |
| . | LIPO Battery Charger | 1 | 1 |
| Tools | Screw driver | 1 | 1 |
| . | Rivet tool | 1 | 1 |
| Miscellaneous | PH_M2x4mm_K | 8 | 8 |
| . | PH_T2x6mm_K | 4 | 8 |
| . | PH_M2x12mm_K | 0 | 4 |
| . | PH_M2.5x8mm_K | 16 | 16 |
| . | PH_M2.5x12mm_K | 0 | 20 |
| . | PH_T2.6x12mm_K | 16 | 0 |
| . | PH_M2.5x16mm_K | 4 | 4 |
| . | PH_M3x8mm_K | 44 | 140 |
| . | NUT_M2 | 0 | 4 |
| . | NUT_M2.5 | 20 | 24 |
| . | NUT_M3 | 16 | 96 |
| . | Rivet_1 | 14 | 22 |
| . | Rivet_2 | 2 | 2 |
| . | Spacer | 4 | 4 |
| . | Silicone Spacer | 0 | 4 |
| . | Bracket | 5 | 6 |
| . | Adapter Plate | 1 | 1 |
* The Raspberry Pi 3 Model B+ was included as standard starting in 2019. Earlier models are equipped with a Raspberry Pi 3 Model B.
* The Raspberry Pi 4 Model B has been included as standard since 2021 September.
* The LDS-02 has replaced the previous generation LDS-01 since 2022.
The TurtleBot3 Waffle is discontinued due to the EOL of the Intel® Joule™ 570x SBC.
Open Source Hardware
Complete CAD data is available in Onshape, a full-cloud 3D CAD editor accessible through a web browser from your PC or from portable devices.