
Learn
AWS RoboMaker with Turtlebot3
AWS RoboMaker is a service that makes it easy to develop, test, and deploy intelligent robotics applications at scale. RoboMaker extends the most widely used open-source robotics software framework, Robot Operating System (ROS), with connectivity to cloud services. This includes AWS machine learning services, monitoring services, and analytics services that enable a robot to stream data, navigate, communicate, comprehend, and learn. RoboMaker provides a robotics development environment for application development, a robotics simulation service to accelerate application testing, and a robotics fleet management service for remote application deployment, update, and management.
| Developer Guide |
AWS RoboMaker example with Turtlebot3
AWS RoboMaker – Develop, Test, Deploy, and Manage Intelligent Robotics Apps
AWS RoboMaker Reinforcement Learning example with Turtlebot3
How to Train a Robot Using Reinforcement Learning
Data Collection via Matlab
Thanks to Sebastian Castro, Robotics and AI educator at MathWorks, there is a great material for use of Matlab tools with ROS.
The post, How Do Autonomous Systems “See”? explains deeply about the combination between Matlab tools and ROS; Particularly, Autonomous Drving through the TurtleBot3 AutoRace.
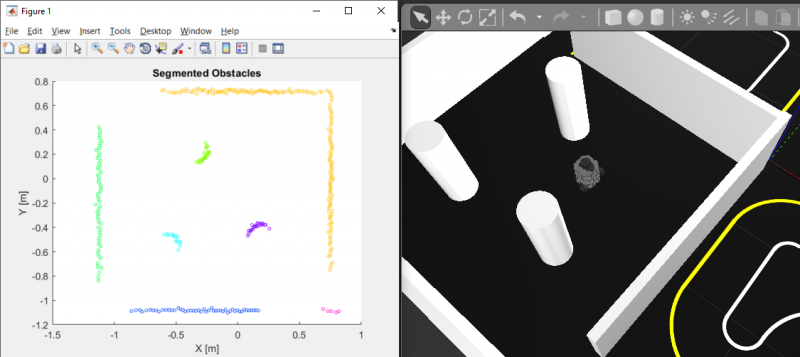
Obstacle detection via Matlab tool.
Reference:
The Construct
This MASTERING WITH ROS: TurtleBot3 lecture is made by the Construct. Within this Course, you are going to learn how you can start working with the TurtleBot3 robot, explore its functionalitities, and how to build interesting ROS applications. If you want to learn more about ROS, please check the ROBOT IGNITE ACADEMY that contains series of online ROS tutorials tied to online simulations, giving you the tools and knowledge to understand and create any ROS based robotics development.
MASTERING WITH ROS: TurtleBot3
What you will learn from MASTERING WITH ROS: TurtleBot3 (Python):
- Basic Usage and control of the TurtleBot3 robot
- How to perform Navigation with TurtleBot3
- Follow a line with TurtleBot3
- Object Recognition with TurtleBot3
- Motion Planning in Moveit with TurtleBot3
- Grasping with TurtleBot3
Have a TurtleBot3 simulation running in 5 minutes with RDS v2.0
TurtleBot3 Laser Scan subscription
TurtleBot3 Blockly
Programming with Blockly to run TurtleBot3 (This tutorial is builed by Dabit Industries)
-
Blockly Wiki: A detailed documentation on how to use Blockly (free and open source software) with TurtleBot3.
TurtleBot3 Simulation on ROS Indigo
TurtleBot3 simulator in Ubuntu 14.04 (This tutorial is builed by Cyaninfinite)
Youtube Course
This ROS courses are a ROS robot programming guide based on the experiences we had accumulated from ROS projects like TurtleBot3, OpenCR and OpenManipulator. We tried to make this a comprehensive guide that covers all aspects necessary for a beginner in ROS. Topics such as embedded system, mobile robots, and robot arms programmed with ROS are included. For those who are new to ROS, there are footnotes throughout the courses providing more information on the web. Through this ROS courses and book, we hope that more people will be aware of and participate in bringing forward the ever-accelerating collective knowledge of Robotics Engineering.
Books
This Handbook is written for
College students and graduate students who want to learn robot programming based on ROS (Robot Operating system) and also for professional researchers and engineers who work on robot development or software programming. We have tried to offer detailed information we learned while working on TurtleBot3 and OpenManipulator. We hope this book will be the complete handbook for beginners in ROS and more people will contribute to the ever-growing community of open robotics.
What you will learn from this book
From the basic concept to practical robot application programming!
- ROS Kinetic Kame : Basic concept, instructions and tools
- How to use sensor and actuator packages on ROS
- Embedded board for ROS : OpenCR1.0
- SLAM & Navigation with TurtleBot3
- How to program a delivery robot using ROS Java
- OpenManipulator simulation using MoveIt! and Gazebo