
Download SDK
This section provides how to download DYNAMIXEL SDK.
Download SDK
There are three ways to install the Dynamixel SDK.
Option 1: Download the SDK source code directly via Git clone.
$ git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git
Option 2: Direct Download in git release page.
Option 3: Install ROS library (It is only available in environments where ROS is installed, and only C++ and Python versions are provided.)
$ sudo apt-get install ros-$ROS_DISTRO-dynamixel-sdk
File Structure
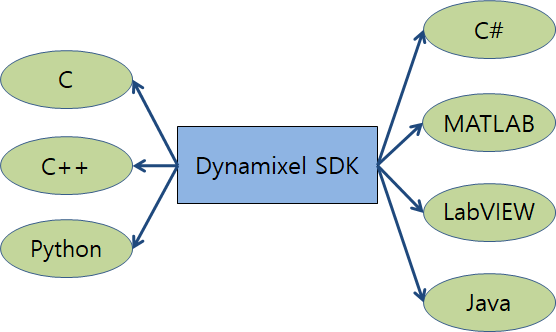
The code examples use either the C or C++ version of the DLL. After extracting the ZIP file, you will see the folder structure shown below.
For example, if you open the C++ folder, you will find four subfolders containing C++ source files, header files, build scripts, and example code.
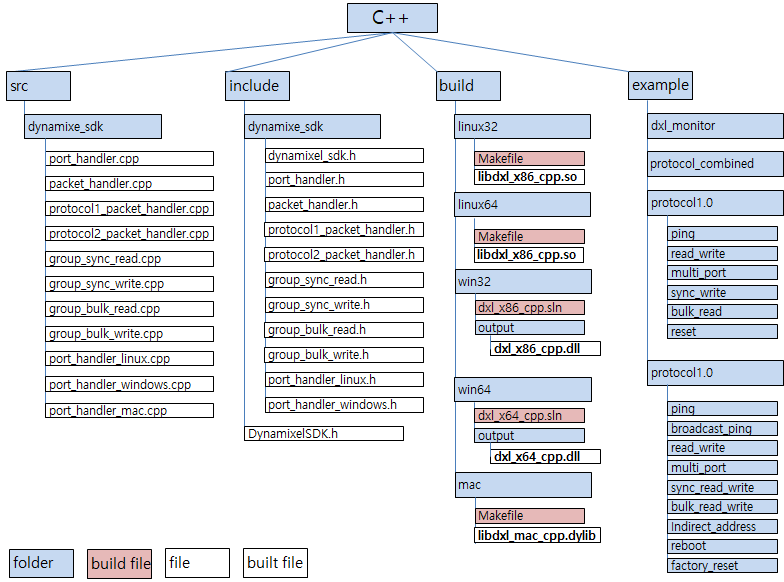
While the PortHandler—which manages the system communication environment—is implemented separately for Linux, macOS, and Windows, the remaining source files are designed to be cross-platform. You can compile them using either a Makefile (for Linux/macOS) or Microsoft Visual Studio (for Windows), depending on your 32-bit or 64-bit platform. The example code demonstrates how to use the SDK functions to control one or more DYNAMIXEL actuators, utilizing pre-built library files (.dll, .so, or .dylib).
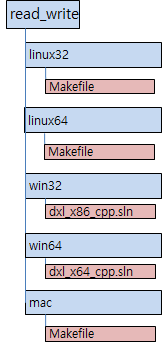
Each example folder also includes the corresponding build files for Linux, macOS, or Windows, targeting both 32-bit and 64-bit platforms. Make sure to build the library files before running the example codes. The ReadWrite example, for instance, shows how to control and read the position of a DYNAMIXEL actuator.
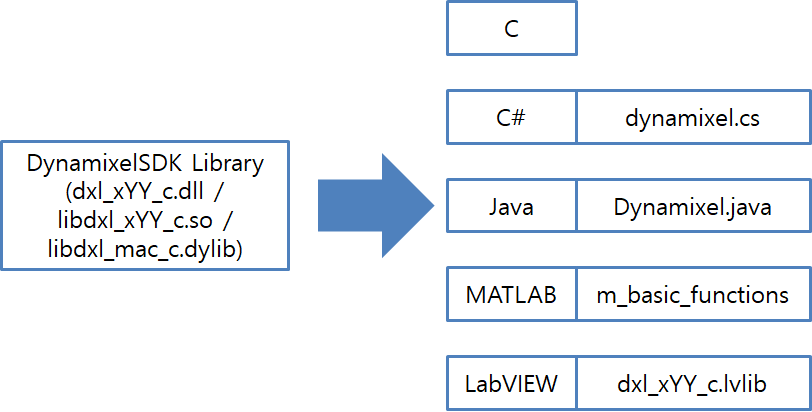
Examples written in C#, Java, MATLAB, and LabVIEW do not use SDK functions implemented directly in those languages. Instead, they interface with the precompiled shared libraries (.dll, .so, or .dylib) built from C source code.
You can find detailed instructions for running the examples in the DYNAMIXEL SDK source repository here