Edit on GitHub
LabVIEW Protocol Combined
-
Description
This example, basically, writes the goal position of Dynamixel and repeats to read its present position, until it stops moving. Read and write function can be used even to handle other multiple items in nearby addresses on the control table lists, such as goal position and velocity.
-
Available Dynamixel model
All models using protocol 1.0 and 2.0
-
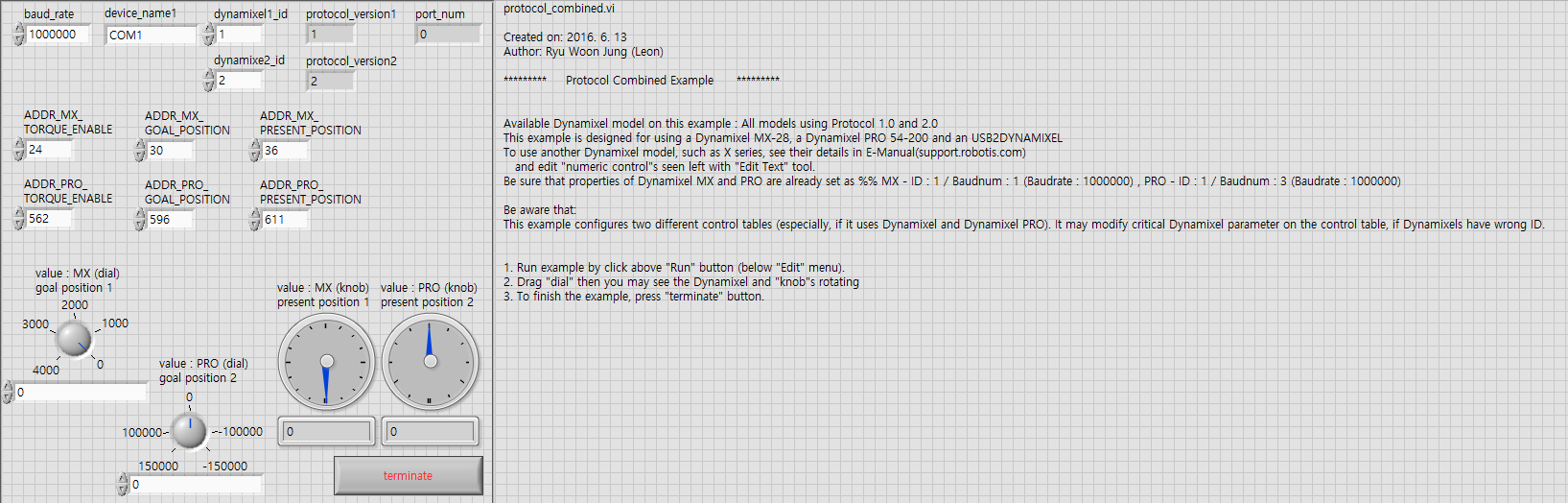
Control Panel
-
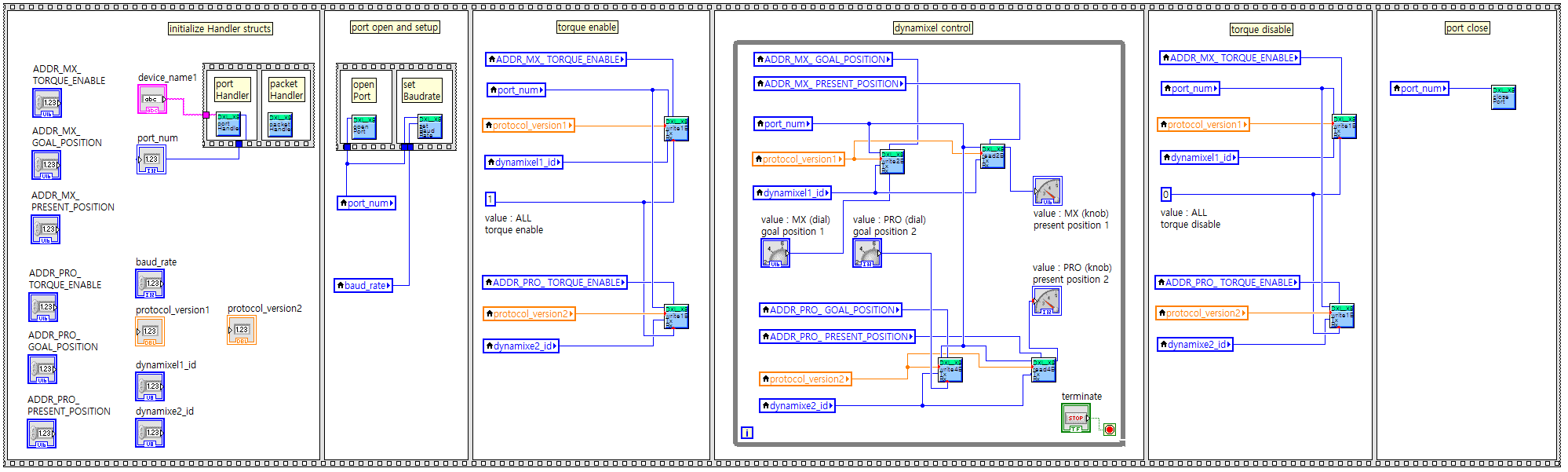
Block Diagram