Device Setup

In order to use the DYNAMIXEL SDK, you’ll need to set up your Controller and DYNAMIXEL.
Controller
Signal Interface
DYNAMIXEL servos communicate using one of the following digital serial interfaces:
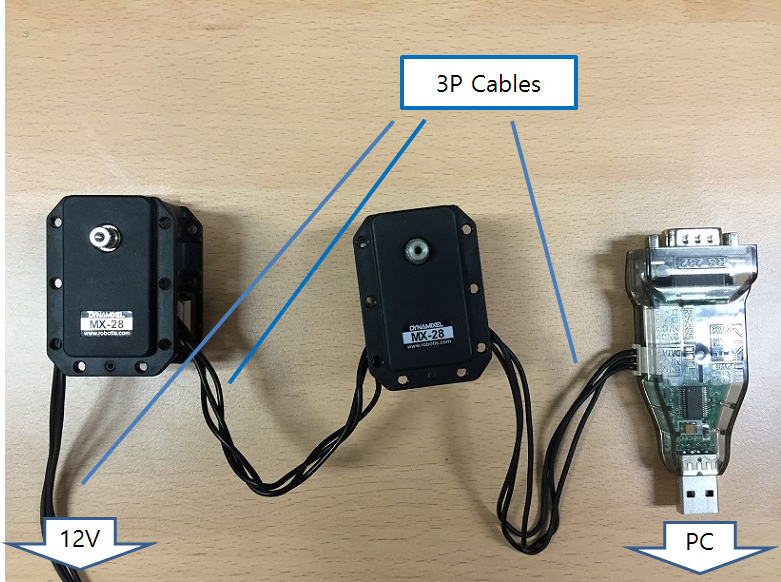
- TTL: TTL-based DYNAMIXEL’s have 3 pin connectors
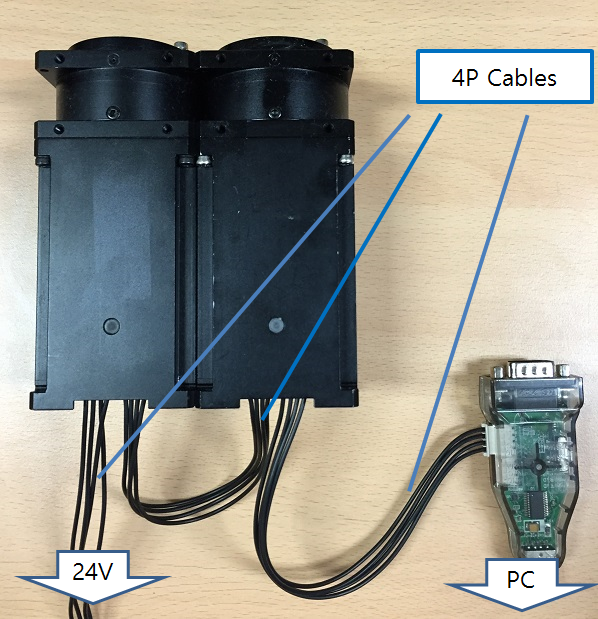
- RS485: RS485-based DYNAMIXEL’s have 4 pin connectors.
The SDK and its examples were written for compatibility with the ROBOTIS U2D2 USB to Serial converter, which is shown below. You can use any other converter as long as it generates half-duplex TTL or RS485 signals.

Since other signal ports, such as UART, I2C, etc., may differ based on your controller specification, advanced users may wish to modify the SDK themselves to optimize for their specific controllers.
The U2D2 requires the configuration of the following settings for communication with connected DYNAMIXEL servos:
- DEVICENAME: The default is
/dev/ttyUSB0for Linux and Mac orCOM1for Windows - DYNAMIXEL ID: Each connected DYNAMIXEL must have a unique ID.
Controllers
The SDK was tested on desktop PCs and common SBCs such as the Raspberry Pi and ODROID, in the following OS configurations:
| PC | Intel Joule | Up Board | Raspberry Pi | ODROID | |
|---|---|---|---|---|---|
| Windows | |||||
| 10 | ✓ | ||||
| IoT | |||||
| Ubuntu | |||||
| 14.04 | ✓ | ✓ | ✓ | ||
| 16.04 | ✓ | ✓ | ✓ | ✓ | |
| Ubuntu Mate | |||||
| 16.04 | ✓ | ✓ | ✓ | ||
| Raspbian | |||||
| Wheezy | ✓ | ✓ | |||
| Jessie | ✓ | ✓ | |||
| Stretch | ✓ | ✓ | |||
| macOS | |||||
| Sierra | ✓ |
✓: Test Successful
X: Test Failed
Blank: Not tested yet
The DYNAMIXEL SDK also supports various microcontroller boards through the Arduino IDE:
- OpenRB-150
- OpenCR
- OpenCM9.04
- Most other Arduino boards.
USB2DYNAMIXEL Driver Installation
NOTE : The FTDI driver may not be compatible with some devices.
Installation in Windows
If you installed ROBOTIS’ R+ software - a suite of software that allows you to easily interface with all of ROBOTIS’ hardware, including ROBOTIS controllers, DYNAMIXEL’s, sensors, and other hardware components - the FTDI driver will be automatically installed.
If you don’t want to install R+, install the latest VCP driver from the FTDI Driver Download page.
Manually Installing the FTDI Driver
-
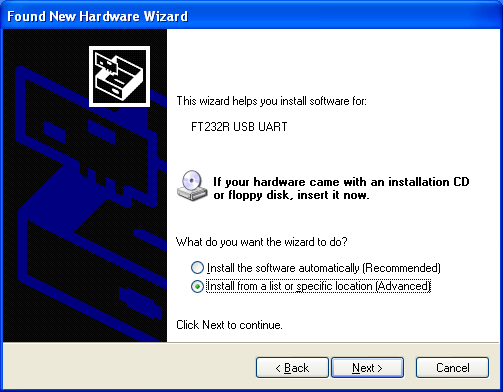
If the FTDI driver isn’t automatically installed, the Found New Hardware Wizard will pop up after connecting the U2D2 to your controller. Select Install from a list or specific location and click Next.
-
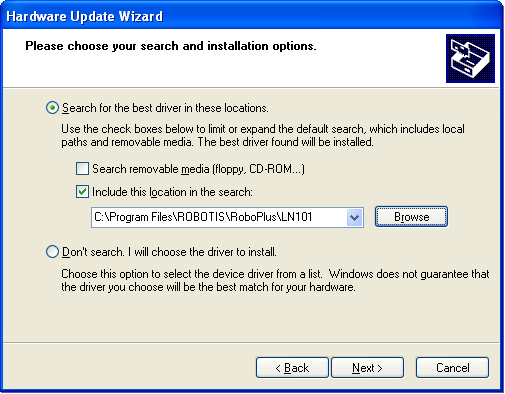
Choose your driver’s directory.
a. The driver must be in the LN101 folder of the R+ installation folder.
b. If you don’t want to install R+, install the latest VCP driver from the FTDI Driver Download page. -
Click Next to start the installation.
-
Click Finish to complete installation of the USB Serial Port driver.

Installation in Linux
Recent Linux releases include the kernel which contains the FT232RL driver for the FTDI driver used by the U2D2. Most users won’t need to install the driver manually.
DYNAMIXEL
The SDK and SDK examples were developed based on the MX-28 and H54-200 PRO DYNAMIXEL’s.
SDK examples were tested with the following DYNAMIXEL’s:
| AX | EX | RX | MX | MX | X | X | PRO | P | Y | |
|---|---|---|---|---|---|---|---|---|---|---|
| Protocol | 1.0 | 1.0 | 1.0 | 1.0 | 2.0 | 1.0 | 2.0 | 2.0 | 2.0 | 2.0 |
| Series | ||||||||||
| 12 | ✓ | - | - | ✓ | - | - | - | - | - | - |
| 18 | ✓ | - | - | - | - | - | - | - | - | - |
| 24 | - | - | ✓ | ✓ | ✓ | - | - | - | - | - |
| 28 | - | - | ✓ | ✓ | ✓ | - | - | - | - | - |
| 64 | - | - | ✓ | ✓ | ✓ | - | - | - | - | - |
| 106 | - | ✓ | - | ✓ | ✓ | - | - | - | - | - |
| 320 | - | - | - | - | - | - | ✓ | - | - | - |
| 330 | - | - | - | - | - | ✓ | ✓ | - | - | - |
| 430 | - | - | - | - | - | ✓ | ✓ | - | - | - |
| 540 | - | - | - | - | - | ✓ | ✓ | - | - | - |
| 42 | - | - | - | - | - | - | - | ✓ | ✓ | - |
| 54 | - | - | - | - | - | - | - | ✓ | ✓ | - |
| 70 | - | - | - | - | - | - | - | - | - | ✓ |
| 80 | - | - | - | - | - | - | - | - | - | ✓ |
✓ : Compatible
X : Incompatible
– : Doesn’t exist
blank : Not tested yet
Power Requirements
-
12V for X Series (also for AX, EX, RX, and MX series)
-
24V for P and Y series
DYNAMIXEL Parameters
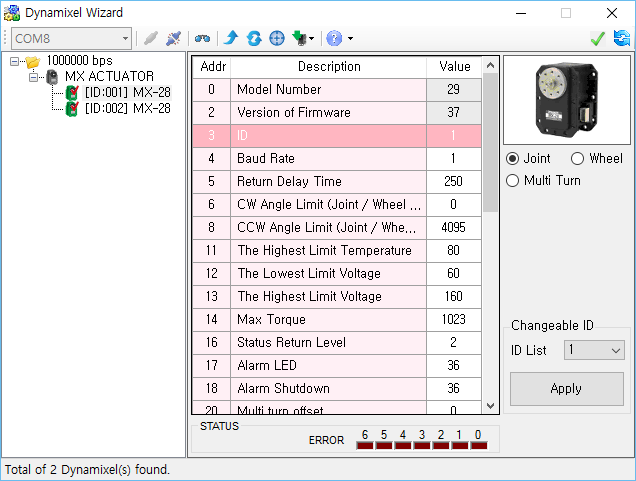
To run the SDK examples, the following DYNAMIXEL parameters may need to be changed:
- ID = 1 (and 2, when the example uses two DYNAMIXELs)
- Baud Rate = 57600 bps (baud value = 34 for MX, 1 for PRO.)
To change DYNAMIXEL parameters, use DYNAMIXEL Wizard or RoboPlus Manager.